Lecture 16 - Reinforcement Learning#
Learning goals#
Understand the definition of agent, environment, state, action, reward, trajectory, policy, and value.
Build a tiny grid world with a chemistry flavor and implement tabular Q-learning step by step.
Compare exploration strategies such as epsilon greedy, optimistic starts, UCB1, and Thompson sampling in bandits.
Practice a simplified policy gradient on a bandit.
0. Setup#
Show code cell source
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from dataclasses import dataclass
from typing import List, Tuple, Dict, Callable, Optional
from matplotlib.patches import Circle, FancyBboxPatch
from matplotlib.patheffects import withStroke
np.random.seed(42)
plt.rcParams["figure.figsize"] = (6, 4)
plt.rcParams["axes.grid"] = False
1. Reinforcement learning concepts#
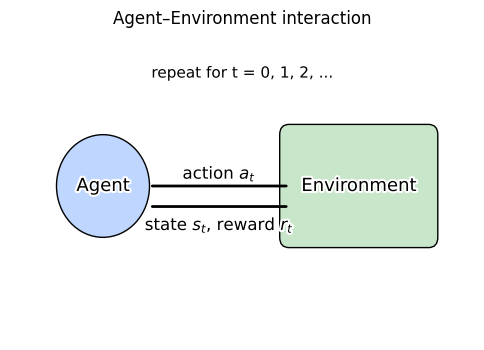
Reinforcement learning studies decision making through repeated interaction.
An agent observes a state \(s\), chooses an action \(a\), gets a reward \(r\), and moves to a new state \(s'\).
The aim is to maximize expected return \(G = r_0 + \gamma r_1 + \gamma^2 r_2 + \cdots\) with \(\gamma \in [0,1)\).
For example, in closed-loop chemistry discovery the agent proposes the next experiment and the environment is the lab system that reports outcomes like yield.
Here are key terms:
State \(s\): summary of what matters right now.
Action \(a\): a choice such as a set of synthesis conditions.
Reward \(r\): scalar signal such as yield or a utility of yield and purity.
Policy \(\pi(a\mid s)\): a rule to pick actions given a state.
Value \(V^{\pi}(s)\): expected return from state \(s\) under policy \(\pi\).
Action value \(Q^{\pi}(s,a)\): expected return if we choose \(a\) in \(s\) then follow \(\pi\).
Model: transition and reward dynamics, often unknown in labs.
The next plot shows this loop visually.
Show code cell source
def _outlined_text(ax, x, y, s, ha="center", va="center", size=12):
pe = [withStroke(linewidth=3, foreground="white")]
ax.text(x, y, s, ha=ha, va=va, fontsize=size, path_effects=pe)
def draw_agent_environment_diagram():
fig, ax = plt.subplots()
ax.set_xlim(0, 10)
ax.set_ylim(0, 6)
ax.axis("off")
# Agent (circle)
agent = Circle((2.0, 3.0), radius=1.0, facecolor="#bfd7ff", edgecolor="black")
ax.add_patch(agent)
_outlined_text(ax, 2.0, 3.0, "Agent", size=13)
# Environment (rounded rectangle)
env = FancyBboxPatch(
(6.0, 2.0), 3.0, 2.0,
boxstyle="round,pad=0.2,rounding_size=0.2",
facecolor="#c8e6c9", edgecolor="black"
)
ax.add_patch(env)
_outlined_text(ax, 7.5, 3.0, "Environment", size=13)
# Arrows: action (Agent -> Env), observation+reward (Env -> Agent)
ax.annotate(
"", xy=(6.0, 3.0), xytext=(3.0, 3.0),
arrowprops=dict(arrowstyle="-", lw=2)
)
_outlined_text(ax, 4.5, 3.25, r"action $a_t$")
ax.annotate(
"", xy=(3.0, 2.6), xytext=(6.0, 2.6),
arrowprops=dict(arrowstyle="-", lw=2)
)
_outlined_text(ax, 4.5, 2.25, r"state $s_t$, reward $r_t$")
# Timeline hint
_outlined_text(ax, 5.0, 5.2, "repeat for t = 0, 1, 2, ...", size=11)
plt.title("Agent–Environment interaction")
plt.show()
draw_agent_environment_diagram()
2. Let’s play games to understand Q-Learning!#
One of the simplest ways of doing Reinforcement Learning is called Q-learning. Here we want to estimate so-called Q-values which are also called action-values, because they map a state of the game-environment to a numerical value for each possible action that the agent may take. The Q-values indicate which action is expected to result in the highest future reward, thus telling the agent which action to take.
Most of time, we do not know what the Q-values are supposed to be, so we first initialize all to zero and then updated repeatedly as new information is collected from the agent playing the game. When update the Q-valu, we consider discount-factor slightly below 1, which this causes more distant rewards (e.g. take 10 steps to get 1 point vs. take 2 step to get 1 point) to contribute less to the Q-value, thus making the agent favour rewards that are closer in time.
Therefore, the formula for updating the Q-value is:
Q-value for state and action = reward + discount * max Q-value for next state
Next, we’ll play interactive “games” that make these updates visible.
2.1 Interactive Game 1 — Breakout#
State
Binned ball and paddle positions plus ball velocity signs.
Actions
Left, Stay, Right.
Controls
← / → or A / D to move the paddle.
Try manual mode first.
Enable Agent in the panel to let Q-learning play automatically.
Adjust:
ε (epsilon): exploration rate
α (alpha): learning rate
γ (gamma): discount factor
Rewards
+1 for breaking a brick
+0.01 for hitting the ball with the paddle
−1 for losing a life
−0.001 per step to encourage faster play
Try training for several episodes and then watch the agent’s learned behavior.
Show code cell source
from IPython.display import HTML
HTML(r"""
<div id="breakout-container" style="font-family: ui-sans-serif, system-ui, -apple-system, Segoe UI, Roboto, Helvetica, Arial; margin: 1rem 0;">
<div style="display:flex;flex-wrap:wrap;align-items:center;gap:.5rem;margin-bottom:.5rem;">
<button id="bo-start" style="padding:.4rem .7rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Start</button>
<button id="bo-pause" style="padding:.4rem .7rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Pause</button>
<button id="bo-reset" style="padding:.4rem .7rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Reset</button>
<label style="margin-left:1rem;display:flex;align-items:center;gap:.35rem;color:#ddd;">
<input type="checkbox" id="stopAtZero" />
Stop at 0 lives
</label>
<span style="opacity:.85;">Controls: ←/→ or A/D, P pause, R reset</span>
</div>
<canvas id="breakout" width="800" height="560" style="max-width:100%;border-radius:12px;box-shadow:0 8px 24px rgba(0,0,0,.35);background:#0b1021;display:block;outline:none;"></canvas>
<div id="bo-msg" style="margin-top:.5rem;color:#ddd;opacity:.9;">Click the canvas to focus.</div>
<details style="margin-top:1rem;background:#0f1329;border:1px solid #222;border-radius:10px;padding:.75rem;color:#e6e6e6;">
<summary style="cursor:pointer;font-weight:600;">Reinforcement Learning demo</summary>
<div style="margin-top:.5rem;display:grid;grid-template-columns:repeat(auto-fit,minmax(220px,1fr));gap:.75rem;">
<label style="display:flex;align-items:center;gap:.5rem;">
<input type="checkbox" id="agentEnabled"/>
Agent enabled
</label>
<label>ε (explore): <input id="eps" type="range" min="0" max="1" step="0.01" value="0.10" style="width:140px;">
<span id="epsV">0.10</span></label>
<label>α (learn rate): <input id="alpha" type="range" min="0" max="1" step="0.01" value="0.20" style="width:140px;">
<span id="alphaV">0.20</span></label>
<label>γ (discount): <input id="gamma" type="range" min="0" max="1" step="0.01" value="0.95" style="width:140px;">
<span id="gammaV">0.95</span></label>
<button id="train1" style="padding:.35rem .6rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Train 1 episode</button>
<button id="train50" style="padding:.35rem .6rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Train 50 episodes</button>
<button id="resetQ" style="padding:.35rem .6rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Reset Q-table</button>
</div>
<div style="margin-top:.5rem;font-size:.95rem;opacity:.9;line-height:1.4;">
<strong>What it shows</strong>: The agent gets <code>+1</code> for breaking a brick, <code>+0.01</code> for paddle hits, <code>-1</code> for losing a life, and a tiny <code>-0.001</code> per step.
<strong>State</strong>: binned ball x, paddle x, ball vx sign, ball vy sign.
<strong>Actions</strong>: Left, Stay, Right.
ε-greedy Q-learning: <code>Q(s,a) ← Q + α[r + γ max_a' Q(s',a') - Q]</code>.
</div>
<div id="rlStats" style="margin-top:.5rem;font-family:ui-monospace, SFMono-Regular, Menlo, Consolas, monospace;"></div>
</details>
<div style="margin-top:.75rem;padding-top:.5rem;border-top:1px solid #222;display:flex;align-items:center;gap:.5rem;color:#ddd;">
<label style="display:flex;align-items:center;gap:.4rem;">
<input type="checkbox" id="noMove"/>
Don’t move (freeze paddle)
</label>
<span style="opacity:.75;">When checked, paddle stays still. Useful to show a baseline or to watch the ball.</span>
</div>
</div>
<script>
(() => {
const cvs = document.getElementById('breakout');
const ctx = cvs.getContext('2d', { alpha: false });
const startBtn = document.getElementById('bo-start');
const pauseBtn = document.getElementById('bo-pause');
const resetBtn = document.getElementById('bo-reset');
const stopAtZero = document.getElementById('stopAtZero');
const msg = document.getElementById('bo-msg');
const noMove = document.getElementById('noMove');
// RL controls
const agentEnabledEl = document.getElementById('agentEnabled');
const epsEl = document.getElementById('eps'), epsV = document.getElementById('epsV');
const alphaEl = document.getElementById('alpha'), alphaV = document.getElementById('alphaV');
const gammaEl = document.getElementById('gamma'), gammaV = document.getElementById('gammaV');
const train1 = document.getElementById('train1');
const train50 = document.getElementById('train50');
const resetQ = document.getElementById('resetQ');
const rlStats = document.getElementById('rlStats');
epsEl.oninput = ()=> epsV.textContent = Number(epsEl.value).toFixed(2);
alphaEl.oninput = ()=> alphaV.textContent = Number(alphaEl.value).toFixed(2);
gammaEl.oninput = ()=> gammaV.textContent = Number(gammaEl.value).toFixed(2);
epsV.textContent = Number(epsEl.value).toFixed(2);
alphaV.textContent = Number(alphaEl.value).toFixed(2);
gammaV.textContent = Number(gammaEl.value).toFixed(2);
const W = cvs.width, H = cvs.height;
const PADDLE_W = 120, PADDLE_H = 14, PADDLE_Y = H - 36, PADDLE_SPEED = 8;
const BALL_R = 8, BASE_BALL_SPD = 5.5;
const TOP_MARGIN = 64;
const ROWS = 7, COLS = 12, GAP = 4, PAD = 16, BRICK_H = 22;
const COLORS = ["#ff6b6b","#ffd93d","#6bcbef","#51cf66","#845ef7","#ffa94d","#f06595"];
const HUD = {color:"#e6e6e6"};
let paddle, ball, bricks, score, lives, level;
let running = false, paused = false, rafId = null;
// Agent control flags
let training = false, abortAgent = false;
const keys = {left:false, right:false};
function clamp(v, lo, hi){ return Math.max(lo, Math.min(hi, v)); }
function initPaddle(){
return { x:(W-PADDLE_W)/2, y:PADDLE_Y, w:PADDLE_W, h:PADDLE_H, dx:0 };
}
function initBall(centerOnP=true){
const x = centerOnP ? paddle.x + paddle.w/2 : W/2;
const y = centerOnP ? paddle.y - BALL_R - 1 : H/2;
const angle = (Math.random()*0.8 - 0.4);
const speed = BASE_BALL_SPD * (1 + (level-1)*0.06);
return { x, y, r:BALL_R, dx: speed * (Math.random()<.5?-1:1) * Math.abs(angle*1.6),
dy: -speed * (1.1 - Math.abs(angle)) };
}
function makeBricks(){
const totalGap = (COLS-1)*GAP;
const bw = (W - 2*PAD - totalGap) / COLS;
const arr = [];
for(let r=0;r<ROWS;r++){
for(let c=0;c<COLS;c++){
const x = PAD + c*(bw + GAP);
const y = TOP_MARGIN + r*(BRICK_H + GAP);
const hits = 1;
arr.push({x,y,w:bw,h:BRICK_H,color:COLORS[r%COLORS.length],hits,score:60+10*r, alive:true});
}
}
return arr;
}
function resetGame(){
score = 0; lives = 3; level = 1;
paddle = initPaddle();
bricks = makeBricks();
ball = initBall();
paused = false; running = false;
msg.textContent = "Press Start or hit P to play. Click the canvas to focus.";
draw();
}
function nextLevel(){
level++;
bricks = makeBricks();
ball = initBall(true);
msg.textContent = "Level " + level;
setTimeout(()=>{ if(msg.textContent.startsWith("Level")) msg.textContent=""; }, 700);
}
function rectsIntersect(a, b){
return a.x < b.x+b.w && a.x+a.w > b.x && a.y < b.y+b.h && a.y+a.h > b.y;
}
function drawHUD(){
ctx.fillStyle = HUD.color;
ctx.font = "16px ui-sans-serif, system-ui, -apple-system, Segoe UI, Roboto, Helvetica, Arial";
ctx.textBaseline = "top";
ctx.fillText(`Score: ${score}`, 10, 10);
ctx.fillText(`Lives: ${lives}`, 10, 30);
ctx.fillText(`Level: ${level}`, 10, 50);
ctx.strokeStyle = "#263238";
ctx.beginPath(); ctx.moveTo(0, TOP_MARGIN); ctx.lineTo(W, TOP_MARGIN); ctx.stroke();
}
function draw(){
ctx.fillStyle = "#0b1021";
ctx.fillRect(0,0,W,H);
// Paddle
ctx.fillStyle = "#e6e6e6";
ctx.fillRect(paddle.x, paddle.y, paddle.w, paddle.h);
// Ball
ctx.fillStyle = "#ffdd57";
ctx.beginPath();
ctx.arc(ball.x, ball.y, ball.r, 0, Math.PI*2);
ctx.fill();
// Bricks
for(const b of bricks){
if(!b.alive) continue;
ctx.fillStyle = b.color;
ctx.fillRect(b.x, b.y, b.w, b.h);
}
drawHUD();
}
// ---------- RL bits ----------
const A_LEFT = 0, A_STAY = 1, A_RIGHT = 2;
const ACTIONS = [A_LEFT, A_STAY, A_RIGHT];
let Q = new Map(); // key -> Float32Array(3)
function qGet(key){
if(!Q.has(key)) Q.set(key, new Float32Array(3)); // zeros
return Q.get(key);
}
function argmax(arr){ let mi=0, mv=arr[0]; for(let i=1;i<arr.length;i++){ if(arr[i]>mv){mv=arr[i];mi=i;} } return mi; }
// Discretize state
const BX_BINS = 12, PX_BINS = 12;
function stateKey(){
const bx = Math.floor(clamp(ball.x,0,W-1) / (W/BX_BINS));
const px = Math.floor(clamp(paddle.x,0,W-paddle.w) / ((W-paddle.w)/PX_BINS));
const vx = ball.dx > 0 ? 1 : (ball.dx < 0 ? -1 : 0);
const vy = ball.dy > 0 ? 1 : -1;
return `${bx}|${px}|${vx}|${vy}`;
}
function agentAct(eps){
if(Math.random() < eps) return ACTIONS[Math.floor(Math.random()*ACTIONS.length)];
const q = qGet(stateKey());
return argmax(q);
}
function applyAction(a){
if(a === A_LEFT) { keys.left = true; keys.right = false; }
else if(a === A_RIGHT) { keys.right = true; keys.left = false; }
else { keys.left = false; keys.right = false; } // A_STAY
}
function stepReward({hitBrick=false, hitPaddle=false, lostLife=false}){
let r = -0.001;
if(hitBrick) r += 1.0;
if(hitPaddle) r += 0.01;
if(lostLife) r -= 1;
return r;
}
let epReward = 0, epSteps = 0, episodesDone = 0;
// Helper to stop the agent cleanly
function stopAgent(reason = ""){
abortAgent = true;
training = false;
agentEnabledEl.checked = false;
msg.textContent = reason || "Agent stopped.";
}
// ---------- Game update ----------
function update(){
// Freeze mode overrides everything
if(noMove.checked){
keys.left = false;
keys.right = false;
}
// Choose action if agent enabled and not frozen
const agentOn = agentEnabledEl?.checked && !noMove.checked;
let prevKey, a, qArr;
if(agentOn){
prevKey = stateKey();
a = agentAct(Number(epsEl.value));
qArr = qGet(prevKey);
applyAction(a);
}
// Paddle control
paddle.dx = (keys.left?-PADDLE_SPEED:0) + (keys.right?PADDLE_SPEED:0);
if(noMove.checked) paddle.dx = 0;
paddle.x += paddle.dx;
paddle.x = clamp(paddle.x, 0, W - paddle.w);
// Move ball
ball.x += ball.dx;
ball.y += ball.dy;
// Walls
if(ball.x - ball.r <= 0){ ball.x = ball.r; ball.dx *= -1; }
if(ball.x + ball.r >= W){ ball.x = W - ball.r; ball.dx *= -1; }
if(ball.y - ball.r <= TOP_MARGIN){ ball.y = TOP_MARGIN + ball.r; ball.dy *= -1; }
// Collisions
let hitPaddle = false, hitBrick = false, lostLife = false;
// Paddle hit
const pRect = {x:paddle.x,y:paddle.y,w:paddle.w,h:paddle.h};
const bRect = {x:ball.x-ball.r,y:ball.y-ball.r,w:ball.r*2,h:ball.r*2};
if(rectsIntersect(pRect, bRect) && ball.dy > 0){
hitPaddle = true;
const hitPos = (ball.x - paddle.x) / paddle.w;
const angle = (hitPos - 0.5) * 1.2;
const speed = Math.hypot(ball.dx, ball.dy) || (BASE_BALL_SPD*(1+(level-1)*0.06));
ball.dx = speed * angle * 1.6;
ball.dy = -Math.abs(speed * (1.0 - Math.abs(angle)));
ball.y = paddle.y - ball.r - 0.01;
}
// Brick hits
for(let i=0;i<bricks.length;i++){
const b = bricks[i];
if(!b.alive) continue;
const br = {x:b.x,y:b.y,w:b.w,h:b.h};
if(rectsIntersect(br, {x:ball.x-ball.r,y:ball.y-ball.r,w:ball.r*2,h:ball.r*2})){
const overlapLeft = (ball.x + ball.r) - b.x;
const overlapRight = (b.x + b.w) - (ball.x - ball.r);
const overlapTop = (ball.y + ball.r) - b.y;
const overlapBottom = (b.y + b.h) - (ball.y - ball.r);
const minOv = Math.min(overlapLeft, overlapRight, overlapTop, overlapBottom);
if(minOv === overlapLeft || minOv === overlapRight) ball.dx *= -1; else ball.dy *= -1;
b.hits -= 1;
if(b.hits <= 0){ b.alive = false; score += b.score; hitBrick = true; }
break;
}
}
// Lose life
if(ball.y - ball.r > H){
lives -= 1;
lostLife = true;
ball = initBall(true);
msg.textContent = "Life lost.";
setTimeout(()=>{ if(msg.textContent === "Life lost.") msg.textContent=""; }, 500);
if(lives <= 0 && stopAtZero.checked){
running = false;
msg.textContent = "Game over. Press Reset or R.";
}
}
// Next level
if(bricks.every(b => !b.alive)){
nextLevel();
}
// RL update
if(agentEnabledEl?.checked && !noMove.checked){
const r = stepReward({hitBrick, hitPaddle, lostLife});
const nextKey = stateKey();
const qNext = qGet(nextKey);
const tdTarget = r + Number(gammaEl.value) * Math.max(qNext[0], qNext[1], qNext[2]);
const aIdx = typeof a === "number" ? a : 1;
qArr[aIdx] = qArr[aIdx] + Number(alphaEl.value) * (tdTarget - qArr[aIdx]);
epReward += r;
epSteps += 1;
}
}
function loop(){
if(!running || paused){
draw();
} else {
update();
draw();
}
rafId = requestAnimationFrame(loop);
}
// Input: handle pause and reset even when agent is enabled
function setKey(e, isDown){
const key = e.key || e.code;
// Always allow pause and reset
if(isDown){
if(key === "p" || key === "P"){
paused = !paused;
msg.textContent = paused ? "Paused" : "";
}
if(key === "r" || key === "R"){
if(training || agentEnabledEl.checked) stopAgent("Reset");
resetGame();
}
}
// Block manual movement while agent is enabled or frozen
const blockMovement = agentEnabledEl?.checked || noMove.checked;
if(!blockMovement){
if(key === "ArrowLeft" || key === "Left" || key === "a" || key === "A"){ keys.left = isDown; e.preventDefault(); }
if(key === "ArrowRight" || key === "Right" || key === "d" || key === "D"){ keys.right = isDown; e.preventDefault(); }
}
}
cvs.tabIndex = 0;
cvs.addEventListener('keydown', (e)=>setKey(e, true));
cvs.addEventListener('keyup', (e)=>setKey(e, false));
cvs.addEventListener('mousedown', ()=>{ cvs.focus(); });
// Buttons
startBtn.onclick = () => {
running = true; paused = false; msg.textContent = ""; cvs.focus();
};
pauseBtn.onclick = () => {
if(running){
paused = !paused;
msg.textContent = paused ? "Paused" : "";
cvs.focus();
}
};
resetBtn.onclick = () => {
if(training || agentEnabledEl.checked) stopAgent("Reset");
resetGame();
cvs.focus();
};
// Abort training if user disables the agent
agentEnabledEl.addEventListener('change', ()=>{
if(!agentEnabledEl.checked && training){
stopAgent("Agent disabled");
}
});
document.addEventListener('keydown', (e)=>{ if(document.activeElement===cvs) setKey(e, true); });
document.addEventListener('keyup', (e)=>{ if(document.activeElement===cvs) setKey(e, false); });
// RL helpers
function resetQTable(){ Q = new Map(); }
function runEpisode(maxSteps=4000){
const prevAgent = agentEnabledEl.checked;
const prevFreeze = noMove.checked;
agentEnabledEl.checked = true;
noMove.checked = false;
epReward = 0; epSteps = 0;
if(!running){ resetGame(); running = true; paused = false; }
const targetZero = stopAtZero.checked;
stopAtZero.checked = true;
let steps = 0;
abortAgent = false;
training = true;
return new Promise(resolve=>{
function cleanup(){
running = false;
paused = false;
stopAtZero.checked = targetZero;
agentEnabledEl.checked = prevAgent && !abortAgent;
noMove.checked = prevFreeze;
episodesDone += 1;
rlStats.textContent = `Episodes: ${episodesDone} | Steps: ${epSteps} | Return: ${epReward.toFixed(2)} | Q-states: ${Q.size}`;
training = false;
}
function tick(){
if(abortAgent){
cleanup();
resolve();
return;
}
if(paused){
requestAnimationFrame(tick);
return;
}
if(steps >= maxSteps || lives <= 0){
cleanup();
resolve();
return;
}
update();
steps++;
requestAnimationFrame(tick);
}
requestAnimationFrame(tick);
});
}
train1.onclick = async ()=>{ await runEpisode(3000); };
train50.onclick = async ()=>{
for(let i=0;i<50;i++){
if(abortAgent) break;
await runEpisode(3000);
}
};
resetQ.onclick = ()=>{ resetQTable(); rlStats.textContent = "Q-table cleared."; };
// Init
resetGame();
cancelAnimationFrame(rafId);
loop();
})();
</script>
""")
Reinforcement Learning demo
+1 for breaking a brick, +0.01 for paddle hits, -1 for losing a life, and a tiny -0.001 per step.
State: binned ball x, paddle x, ball vx sign, ball vy sign.
Actions: Left, Stay, Right.
ε-greedy Q-learning: Q(s,a) ← Q + α[r + γ max_a' Q(s',a') - Q].
⏰ Exercise
Use very large or small ɛ̝ and γ values (e.g. 0 and 1) to see any changes on the agent’s behaviour.
2.2 Interactive Game 2 — Maze#
In this grid world, each cell is a state, and the agent learns to reach the goal.
Reward:
−1 per move, +100 at the goal → shorter paths yield higher return
Actions:
Up, Down, Left, Right
Learning rule:
$\(
Q(s,a) \leftarrow Q(s,a) + \alpha [r + \gamma \max_{a'} Q(s',a') - Q(s,a)]
\)$
Enable the agent, train for multiple episodes, and observe how the route shortens over time.
Show code cell source
from IPython.display import HTML
HTML(r"""
<div id="maze2-container" style="font-family: ui-sans-serif, system-ui, -apple-system, Segoe UI, Roboto, Helvetica, Arial; margin: 1rem 0;">
<div style="display:flex;flex-wrap:wrap;align-items:center;gap:.5rem;margin-bottom:.5rem;">
<button id="mz2-start" style="padding:.4rem .7rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Start</button>
<button id="mz2-pause" style="padding:.4rem .7rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Pause</button>
<button id="mz2-reset" style="padding:.4rem .7rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Reset</button>
<label style="display:flex;align-items:center;gap:.35rem;color:#ddd;">
<input type="checkbox" id="freezeAgent" />
Don’t move (freeze agent)
</label>
<label style="display:flex;align-items:center;gap:.35rem;color:#ddd;">
<input type="checkbox" id="autoContinue" />
Auto-continue episodes
</label>
<span style="opacity:.85;">Play with ←/→/↑/↓. R resets. P pauses. Click the canvas to focus.</span>
</div>
<canvas id="maze2" width="384" height="384" style="max-width:100%;border-radius:12px;box-shadow:0 8px 24px rgba(0,0,0,.35);background:#000;display:block;outline:none;"></canvas>
<details style="margin-top:1rem;background:#0f1329;border:1px solid #222;border-radius:10px;padding:.75rem;color:#e6e6e6;">
<summary style="cursor:pointer;font-weight:600;">Reinforcement Learning demo</summary>
<div style="margin-top:.5rem;display:grid;grid-template-columns:repeat(auto-fit,minmax(220px,1fr));gap:.75rem;">
<label style="display:flex;align-items:center;gap:.5rem;">
<input type="checkbox" id="agentEnabled"/>
Agent enabled
</label>
<label>ε (explore): <input id="mz2-eps" type="range" min="0" max="1" step="0.01" value="0.10" style="width:140px;">
<span id="mz2-epsV">0.10</span></label>
<label>α (learn rate): <input id="mz2-alpha" type="range" min="0" max="1" step="0.01" value="0.20" style="width:140px;">
<span id="mz2-alphaV">0.20</span></label>
<label>γ (discount): <input id="mz2-gamma" type="range" min="0" max="1" step="0.01" value="0.95" style="width:140px;">
<span id="mz2-gammaV">0.95</span></label>
<button id="mz2-train1" style="padding:.35rem .6rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Train 1 episode</button>
<button id="mz2-train50" style="padding:.35rem .6rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Train 100 episodes</button>
<button id="mz2-resetQ" style="padding:.35rem .6rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Reset Q-table</button>
</div>
<div style="margin-top:.5rem;font-size:.95rem;opacity:.9;line-height:1.4;">
<strong>What it shows</strong>: Reward is <code>-1</code> every time step and <code>+100</code> at the goal. Shorter paths earn higher return.<br>
<strong>State</strong>: grid cell (x,y). <strong>Actions</strong>: Up, Down, Left, Right.<br>
ε-greedy Q-learning: <code>Q(s,a) ← Q(s,a) + α[r + γ max_a' Q(s',a') − Q(s,a)]</code>.
</div>
<div id="mz2-stats" style="margin-top:.5rem;font-family:ui-monospace, SFMono-Regular, Menlo, Consolas, monospace;"></div>
</details>
</div>
<script>
(() => {
const cvs = document.getElementById('maze2');
const ctx = cvs.getContext('2d');
const startBtn = document.getElementById('mz2-start');
const pauseBtn = document.getElementById('mz2-pause');
const resetBtn = document.getElementById('mz2-reset');
const freezeAgentEl = document.getElementById('freezeAgent');
const autoContinueEl = document.getElementById('autoContinue');
const stats = document.getElementById('mz2-stats');
// RL panel
const agentEnabledEl = document.getElementById('agentEnabled');
const epsEl = document.getElementById('mz2-eps'), epsV = document.getElementById('mz2-epsV');
const alphaEl = document.getElementById('mz2-alpha'), alphaV = document.getElementById('mz2-alphaV');
const gammaEl = document.getElementById('mz2-gamma'), gammaV = document.getElementById('mz2-gammaV');
const train1 = document.getElementById('mz2-train1');
const train50 = document.getElementById('mz2-train50');
const resetQBtn = document.getElementById('mz2-resetQ');
// Training control flags
let training = false;
let abortAgent = false;
function syncVals(){
epsV.textContent = Number(epsEl.value).toFixed(2);
alphaV.textContent = Number(alphaEl.value).toFixed(2);
gammaV.textContent = Number(gammaEl.value).toFixed(2);
}
epsEl.oninput = syncVals; alphaEl.oninput = syncVals; gammaEl.oninput = syncVals; syncVals();
// Maze: 1 open, 0 wall
const maze = [
[0,1,1,1,0,1,0,1],
[1,1,1,1,1,1,1,1],
[1,1,0,0,0,1,0,0],
[0,1,1,0,0,1,1,1],
[0,0,1,1,0,0,0,1],
[0,1,0,1,0,1,0,1],
[0,1,0,1,0,1,0,1],
[0,1,1,1,1,1,0,1],
];
const N = maze.length;
const CELL = Math.floor(cvs.width / N);
// Colors
const WHITE="#ffffff";
const BLACK="#000000";
const WALL="#1a1a1a";
const AGENT="#3af";
const GOAL="#ffdd57";
const GRID="#333";
// Start at first open cell on left edge
let start = null;
for(let y=0;y<N;y++){ if(maze[y][0]===1){ start={x:0,y:y}; break; } }
if(!start) start = {x:0,y:1};
const goal = {x:N-1, y:N-1};
let agent = {...start};
let running = false, paused = false;
// Fog of war
let seenOpen = Array.from({length:N}, ()=>Array(N).fill(false));
let seenWall = Array.from({length:N}, ()=>Array(N).fill(false));
function reveal(x,y){
if(x<0||y<0||x>=N||y>=N) return;
if(maze[y][x]===1) seenOpen[y][x] = true;
else seenWall[y][x] = true;
}
// Human control
const keys = {left:false,right:false,up:false,down:false};
function setKey(e,down){
const k = e.key || e.code;
// Always allow pause and reset even in agent mode
if(down){
if(k==='p' || k==='P'){
paused = !paused;
}
if(k==='r' || k==='R'){
if(training || agentEnabledEl.checked) stopAgent("Reset");
resetGame();
}
}
// Movement blocked when agent is on or frozen
const blockMovement = agentEnabledEl.checked || freezeAgentEl.checked;
if(!blockMovement){
if(k==='ArrowLeft' || k==='Left'){ keys.left=down; e.preventDefault(); }
if(k==='ArrowRight'|| k==='Right'){ keys.right=down; e.preventDefault(); }
if(k==='ArrowUp' || k==='Up'){ keys.up=down; e.preventDefault(); }
if(k==='ArrowDown' || k==='Down'){ keys.down=down; e.preventDefault(); }
}
}
cvs.tabIndex = 0;
cvs.addEventListener('keydown', e=>setKey(e,true));
cvs.addEventListener('keyup', e=>setKey(e,false));
document.addEventListener('keydown', e=>{ if(document.activeElement===cvs) setKey(e,true); });
document.addEventListener('keyup', e=>{ if(document.activeElement===cvs) setKey(e,false); });
cvs.addEventListener('mousedown', ()=>cvs.focus());
// RL
const ACTIONS = [
{dx:0,dy:-1,name:'U'},
{dx:0,dy: 1,name:'D'},
{dx:-1,dy:0,name:'L'},
{dx: 1,dy:0,name:'R'},
];
function keyOf(x,y){ return `${x},${y}`; }
let Q = new Map(); // key -> Float32Array(4)
function qGet(k){ if(!Q.has(k)) Q.set(k,new Float32Array(4)); return Q.get(k); }
function argmax(arr){ let i=0,m=arr[0]; for(let j=1;j<arr.length;j++) if(arr[j]>m){ m=arr[j]; i=j; } return i; }
let epReward=0, epSteps=0, episodes=0;
function canMove(nx,ny){
if(nx<0||ny<0||nx>=N||ny>=N) return false;
return maze[ny][nx]===1;
}
// Reward: -1 per step, 0 at goal
function rewardFor(nx,ny){
if(nx===goal.x && ny===goal.y) return 0;
return -1;
}
function agentAttemptMove(dx,dy){
const tx = agent.x + dx;
const ty = agent.y + dy;
reveal(tx, ty);
if(canMove(tx,ty)){
agent.x = tx; agent.y = ty;
return true;
}
return false;
}
function agentStep(){
const s = keyOf(agent.x,agent.y);
const q = qGet(s);
const eps = Number(epsEl.value);
let aIdx = Math.random()<eps ? Math.floor(Math.random()*ACTIONS.length) : argmax(q);
const a = ACTIONS[aIdx];
agentAttemptMove(a.dx, a.dy);
const r = rewardFor(agent.x, agent.y);
const s2 = keyOf(agent.x, agent.y);
const q2 = qGet(s2);
const alpha = Number(alphaEl.value), gamma = Number(gammaEl.value);
const tdTarget = r + gamma * Math.max(q2[0], q2[1], q2[2], q2[3]);
q[aIdx] = q[aIdx] + alpha * (tdTarget - q[aIdx]);
reveal(agent.x, agent.y);
epReward += r; epSteps += 1;
}
// Human
let _humanTick = 0;
function humanStep(){
_humanTick = (_humanTick + 1) % 8;
if(_humanTick !== 0) return;
let nx = agent.x, ny = agent.y;
if(keys.left) nx -= 1;
if(keys.right) nx += 1;
if(keys.up) ny -= 1;
if(keys.down) ny += 1;
reveal(nx, ny);
if(canMove(nx,ny)){
agent.x = nx; agent.y = ny;
reveal(agent.x, agent.y);
}
}
function draw(){
for(let y=0;y<N;y++){
for(let x=0;x<N;x++){
let fill = BLACK;
if(seenOpen[y][x]) fill = WHITE;
else if(seenWall[y][x]) fill = WALL;
ctx.fillStyle = fill;
ctx.fillRect(x*CELL, y*CELL, CELL, CELL);
}
}
// Grid
ctx.strokeStyle = GRID;
for(let i=0;i<=N;i++){
ctx.beginPath(); ctx.moveTo(0,i*CELL); ctx.lineTo(N*CELL,i*CELL); ctx.stroke();
ctx.beginPath(); ctx.moveTo(i*CELL,0); ctx.lineTo(i*CELL,N*CELL); ctx.stroke();
}
// Goal if known or reached
if(seenOpen[goal.y][goal.x] || (agent.x===goal.x && agent.y===goal.y)){
ctx.fillStyle = GOAL;
ctx.fillRect(goal.x*CELL, goal.y*CELL, CELL, CELL);
}
// Agent
ctx.fillStyle = AGENT;
ctx.beginPath();
ctx.arc(agent.x*CELL + CELL/2, agent.y*CELL + CELL/2, CELL*0.33, 0, Math.PI*2);
ctx.fill();
}
function onEpisodeEnd(){
episodes += 1;
stats.textContent = `Episodes: ${episodes} | Steps: ${epSteps} | Return: ${epReward.toFixed(2)} | Q-states: ${Q.size}`;
if(autoContinueEl.checked){
resetGame();
running = true;
} else {
running = false;
}
}
function update(){
if(agentEnabledEl.checked && !freezeAgentEl.checked){
agentStep();
} else {
humanStep();
}
if(agent.x===goal.x && agent.y===goal.y && agentEnabledEl.checked){
onEpisodeEnd();
}
}
function loop(){
if(running && !paused) update();
draw();
requestAnimationFrame(loop);
}
function resetGame(){
agent = {...start};
epReward = 0; epSteps = 0;
paused = false;
seenOpen = Array.from({length:N}, ()=>Array(N).fill(false));
seenWall = Array.from({length:N}, ()=>Array(N).fill(false));
reveal(agent.x, agent.y);
}
// Stop agent helper
function stopAgent(reason = ""){
abortAgent = true;
training = false;
agentEnabledEl.checked = false;
if(reason) stats.textContent = reason;
}
// Buttons
startBtn.onclick = () => { running = true; paused = false; cvs.focus(); };
pauseBtn.onclick = () => { if(running){ paused = !paused; cvs.focus(); } };
resetBtn.onclick = () => { if(training || agentEnabledEl.checked) stopAgent("Agent stopped by Reset."); resetGame(); cvs.focus(); };
// Turn off agent mid-episode
agentEnabledEl.addEventListener('change', ()=>{
if(!agentEnabledEl.checked && training){
stopAgent("Agent disabled.");
}
});
function resetQ(){ Q = new Map(); stats.textContent = "Q-table cleared."; }
resetQBtn.onclick = resetQ;
async function runEpisode(maxSteps=500){
const prevAuto = autoContinueEl.checked;
autoContinueEl.checked = false;
const prevRun = running, prevPause = paused, prevAgent = agentEnabledEl.checked, prevFreeze = freezeAgentEl.checked;
agentEnabledEl.checked = true;
freezeAgentEl.checked = false;
resetGame();
running = true; paused = false;
let steps = 0;
abortAgent = false;
training = true;
await new Promise(resolve=>{
function cleanup(){
onEpisodeEnd();
running = prevRun;
paused = prevPause;
agentEnabledEl.checked = prevAgent && !abortAgent;
freezeAgentEl.checked = prevFreeze;
autoContinueEl.checked = prevAuto;
training = false;
}
function tick(){
if(abortAgent){
cleanup();
resolve();
return;
}
if(paused){
requestAnimationFrame(tick);
return;
}
if(steps >= maxSteps || (agent.x===goal.x && agent.y===goal.y)){
cleanup();
resolve();
return;
}
agentStep();
draw();
steps++;
requestAnimationFrame(tick);
}
requestAnimationFrame(tick);
});
}
// Train buttons
train1.onclick = async ()=>{ await runEpisode(500); };
train50.onclick = async ()=>{
for(let i=0;i<100;i++){
if(abortAgent) break;
await runEpisode(500);
}
};
// Init
resetGame();
loop();
})();
</script>
""")
Reinforcement Learning demo
-1 every time step and +100 at the goal. Shorter paths earn higher return.State: grid cell (x,y). Actions: Up, Down, Left, Right.
ε-greedy Q-learning:
Q(s,a) ← Q(s,a) + α[r + γ max_a' Q(s',a') − Q(s,a)].
⏰ Exercise
Try ɛ̝ = 0 or γ = 0 with any learning rate, what do you see?
2.3 Interactive Game 3 — Reaction Surface Screening#
2.3 Interactive Game 3 — Reaction Surface Screening#
This environment resembles a reaction optimization problem.
Cells represent combinations of temperature \(T\) and composition \(x\).
There are:
Walls (black) that block motion
A true optimum (yellow) with reward \(100\)
A decoy optimum (red) with reward \(-50\)
Every step costs −1.
The agent uses ε-greedy Q-learning to find the best route.
Watch how, after enough training, it learns to avoid the decoy and reach the true goal.
Show code cell source
from IPython.display import HTML
HTML(r"""
<div id="chem-container" style="font-family: ui-sans-serif, system-ui, -apple-system, Segoe UI, Roboto, Helvetica, Arial; margin: 1rem 0;">
<div style="display:flex;flex-wrap:wrap;align-items:center;gap:.5rem;margin-bottom:.5rem;">
<button id="ch-start" style="padding:.4rem .7rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Start</button>
<button id="ch-pause" style="padding:.4rem .7rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Pause</button>
<button id="ch-reset" style="padding:.4rem .7rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Reset</button>
<label style="display:flex;align-items:center;gap:.35rem;color:#ddd;">
<input type="checkbox" id="ch-freeze"/> Don’t move (freeze agent)
</label>
<label style="display:flex;align-items:center;gap:.35rem;color:#ddd;">
<input type="checkbox" id="ch-autonext"/> Auto-continue episodes
</label>
<span style="opacity:.85;">Manual: ←/→/↑/↓. R resets. P pauses. Click the canvas to focus.</span>
</div>
<canvas id="chem" width="660" height="660" style="max-width:100%;border-radius:12px;box-shadow:0 8px 24px rgba(0,0,0,.35);background:#000;display:block;outline:none;"></canvas>
<div id="legend" style="margin-top:.5rem;color:#3399ff;display:flex;flex-wrap:wrap;gap:1rem;align-items:center;">
<span style="display:inline-flex;align-items:center;gap:.4rem;">
<span style="width:14px;height:14px;border-radius:50%;background:#ff8800;display:inline-block;"></span> Orange = current
</span>
<span style="display:inline-flex;align-items:center;gap:.4rem;">
<span style="width:14px;height:14px;border-radius:50%;border:3px solid #ffd84d;box-sizing:border-box;display:inline-block;"></span> Yellow = best so far
</span>
<span style="display:inline-flex;align-items:center;gap:.4rem;">
<span style="width:14px;height:14px;background:#ffdd57;display:inline-block;"></span> True optimum
</span>
<span style="display:inline-flex;align-items:center;gap:.4rem;">
<span style="width:14px;height:14px;background:#ff6b6b;display:inline-block;"></span> Decoy optimum
</span>
</div>
<div id="ch-hud" style="margin-top:.5rem;color:#3399ff;font-family:ui-monospace;"></div>
<details style="margin-top:1rem;background:#0f1329;border:1px solid #222;border-radius:10px;padding:.75rem;color:#e6e6e6;" open>
<summary style="cursor:pointer;font-weight:600;">Define wall map (0 = wall, 1 = open)</summary>
<div style="display:flex;flex-direction:column;gap:.5rem;margin-top:.5rem;">
<textarea id="mapText" rows="12" style="width:100%;background:#0b1021;color:#e6e6e6;border:1px solid #333;border-radius:8px;padding:.5rem;white-space:pre; font-family:ui-monospace, SFMono-Regular, Menlo, Consolas, monospace;">
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 0 1 0 0 0 1 1 1 0 0 0 1 1 1 0 1 1 1 1 1 1 1 1
1 0 0 1 1 1 0 1 0 1 1 1 0 1 0 1 0 1 0 0 0 0 0 1 1
1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1 1 1 1 0 1 1
1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 0 0 0 0 1 0 1 1
1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1 1 1 1 0 1 0 1 1
1 1 0 1 0 1 1 1 0 1 0 1 0 1 0 0 0 0 0 1 0 1 0 1 1
0 1 0 1 0 1 0 1 0 1 0 1 0 1 1 1 1 1 0 1 0 1 0 1 1
0 1 0 1 0 1 0 1 0 1 0 1 0 0 0 0 0 1 0 1 0 1 0 1 1
1 1 0 1 0 1 0 0 0 1 0 1 1 1 1 1 0 1 0 1 0 1 0 1 1
1 1 0 1 1 1 0 1 0 0 0 1 0 0 0 1 0 1 0 1 0 1 0 1 1
1 1 0 1 0 1 0 1 1 1 1 1 0 1 0 1 0 1 0 1 0 1 0 1 1
1 1 0 1 0 1 0 0 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1
1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1
1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1
1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1
1 1 0 1 0 1 1 1 1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1
1 1 0 1 0 1 0 1 0 1 0 0 1 1 0 1 0 1 0 1 0 1 0 1 1
1 1 0 1 0 1 0 1 0 0 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1
1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1
1 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 1
1 1 0 1 1 1 0 0 0 1 1 1 0 1 0 1 1 1 0 1 1 1 0 1 1
1 1 0 0 0 0 0 1 1 1 0 0 0 1 1 1 0 1 1 1 1 1 0 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
</textarea>
<div style="display:flex;gap:.5rem;align-items:center;">
<button id="loadMap" style="padding:.35rem .6rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Load map</button>
<span style="opacity:.8;">Tip: rows can be any size, just keep each row the same width.</span>
</div>
</div>
</details>
<details style="margin-top:1rem;background:#0f1329;border:1px solid #222;border-radius:10px;padding:.75rem;color:#e6e6e6;">
<summary style="cursor:pointer;font-weight:600;">Reinforcement Learning demo</summary>
<div style="margin-top:.5rem;display:grid;grid-template-columns:repeat(auto-fit,minmax(220px,1fr));gap:.75rem;">
<label style="display:flex;align-items:center;gap:.5rem;">
<input type="checkbox" id="ch-agent"/>
Agent enabled
</label>
<label>ε (explore): <input id="ch-eps" type="range" min="0" max="1" step="0.01" value="0.15" style="width:140px;">
<span id="ch-epsV">0.15</span></label>
<label>α (learn rate): <input id="ch-alpha" type="range" min="0" max="1" step="0.01" value="0.25" style="width:140px;">
<span id="ch-alphaV">0.25</span></label>
<label>γ (discount): <input id="ch-gamma" type="range" min="0" max="1" step="0.01" value="0.98" style="width:140px;">
<span id="ch-gammaV">0.98</span></label>
<button id="ch-train1" style="padding:.35rem .6rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Train 1 episode</button>
<button id="ch-train50" style="padding:.35rem .6rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Train 50 episodes</button>
<button id="ch-resetQ" style="padding:.35rem .6rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Reset Q-table</button>
</div>
<div style="margin-top:.5rem;font-size:.95rem;opacity:.9;line-height:1.4;">
What it shows: a 2D (T, x) map with yield heatmap. 0 cells are black walls.
Rewards: -1 per step, 0 at the true optimum, -2 at the decoy optimum.
State: grid cell. Actions: Up, Down, Left, Right.
ε greedy Q learning: <code>Q(s,a) ← Q(s,a) + α[r + γ max_a' Q(s',a') − Q(s,a)]</code>.
</div>
<div id="ch-stats" style="margin-top:.5rem;font-family:ui-monospace, SFMono-Regular, Menlo, Consolas, monospace;"></div>
</details>
</div>
<script>
(() => {
// UI
const cvs = document.getElementById('chem');
const ctx = cvs.getContext('2d', {alpha:false});
const startBtn = document.getElementById('ch-start');
const pauseBtn = document.getElementById('ch-pause');
const resetBtn = document.getElementById('ch-reset');
const freezeEl = document.getElementById('ch-freeze');
const autoEl = document.getElementById('ch-autonext');
const hud = document.getElementById('ch-hud');
const mapText = document.getElementById('mapText');
const loadMapBtn = document.getElementById('loadMap');
// RL panel
const agentEl = document.getElementById('ch-agent');
const epsEl = document.getElementById('ch-eps'), epsV = document.getElementById('ch-epsV');
const alphaEl = document.getElementById('ch-alpha'), alphaV = document.getElementById('ch-alphaV');
const gammaEl = document.getElementById('ch-gamma'), gammaV = document.getElementById('ch-gammaV');
const train1 = document.getElementById('ch-train1');
const train50 = document.getElementById('ch-train50');
const resetQBtn = document.getElementById('ch-resetQ');
const stats = document.getElementById('ch-stats');
// Training flags
let training = false;
let abortAgent = false;
function syncVals(){
epsV.textContent = Number(epsEl.value).toFixed(2);
alphaV.textContent = Number(alphaEl.value).toFixed(2);
gammaV.textContent = Number(gammaEl.value).toFixed(2);
}
epsEl.oninput = syncVals; alphaEl.oninput = syncVals; gammaEl.oninput = syncVals; syncVals();
// Yield surface (friendlier colors). Independent of walls.
function gauss2d(x, y, x0, y0, sx, sy, h){
const dx=(x-x0)/sx, dy=(y-y0)/sy;
return h*Math.exp(-0.5*(dx*dx + dy*dy));
}
// State
let NT=0, NX=0, CELL=0, ORGX=0, ORGY=0;
let EV=[], walls=[], s={i:0,j:0}, start={i:0,j:0};
let trueOpt={i:0,j:0}, decoy={i:0,j:0};
function parseMap(text){
const rows = text.trim().split(/\n+/).map(r => r.trim().split(/\s+/).map(Number));
const nx = rows[0].length;
for(const r of rows) if(r.length!==nx) throw new Error("All rows must have the same number of columns.");
for(const r of rows) for(const v of r) if(v!==0 && v!==1) throw new Error("Only 0 or 1 allowed.");
return rows; // [ny][nx]
}
function rebuildFromMatrix(M){
const ny = M.length, nx = M[0].length;
NT = ny; NX = nx;
CELL = Math.floor(Math.min(cvs.width/NT, cvs.height/NX));
ORGX = Math.floor((cvs.width - CELL*NX)/2);
ORGY = Math.floor((cvs.height - CELL*NT)/2);
walls = Array.from({length:NT}, (_,i)=>Array.from({length:NX}, (_,j)=>M[i][j]===0));
// Build a smooth yield surface that respects grid size
const T_min=80, T_max=160, x_min=0.0, x_max=1.0;
function T_of(i){ return T_min + (T_max - T_min) * i/(NT-1 || 1); }
function x_of(j){ return x_min + (x_max - x_min) * j/(NX-1 || 1); }
const truePos = {T: 118, x: 0.28}, decPos = {T: 145, x: 0.78};
EV = Array.from({length:NT}, ()=>Array(NX).fill(0));
for(let i=0;i<NT;i++){
for(let j=0;j<NX;j++){
const T = T_of(i), x = x_of(j);
let v = 0.04
+ gauss2d(T, x, truePos.T, truePos.x, 9.0, 0.06, 0.58)
+ gauss2d(T, x, decPos.T, decPos.x, 11.0, 0.09, 0.36);
v += 0.03 * Math.sin((i/NT)*Math.PI) * (1 - j/(NX-1 || 1));
v = Math.max(0, Math.min(1, v));
if(walls[i][j]) v = 0;
EV[i][j] = v;
}
}
// Choose start
start = {i: NT-1, j: 0};
if(walls[start.i][start.j]){
let found=false;
for(let ii=NT-1; ii>=0; ii--){
if(!walls[ii][0]){ start={i:ii,j:0}; found=true; break; }
}
if(!found){
outer: for(let ii=NT-1; ii>=0; ii--) for(let jj=0; jj<NX; jj++) if(!walls[ii][jj]){ start={i:ii,j:jj}; break outer; }
}
}
s = {...start};
// Place true and decoy near EV maxima but on open cells
function nearestOpen(ii,jj){
if(!walls[ii][jj]) return {i:ii,j:jj};
const q=[[ii,jj]], seen=new Set([`${ii},${jj}`]);
while(q.length){
const [ci,cj]=q.shift();
for(const [di,dj] of [[1,0],[-1,0],[0,1],[0,-1]]){
const ni=ci+di, nj=cj+dj;
if(ni<0||nj<0||ni>=NT||nj>=NX) continue;
const k=`${ni},${nj}`; if(seen.has(k)) continue;
if(!walls[ni][nj]) return {i:ni,j:nj};
seen.add(k); q.push([ni,nj]);
}
}
return {i:ii,j:jj};
}
const tI = Math.round((truePos.T-80)/(160-80)*(NT-1 || 1));
const tJ = Math.round((truePos.x-0)/(1-0)*(NX-1 || 1));
const dI = Math.round((decPos.T-80)/(160-80)*(NT-1 || 1));
const dJ = Math.round((decPos.x-0)/(1-0)*(NX-1 || 1));
trueOpt = nearestOpen(Math.max(0,Math.min(NT-1,tI)), Math.max(0,Math.min(NX-1,tJ)));
decoy = nearestOpen(Math.max(0,Math.min(NT-1,dI)), Math.max(0,Math.min(NX-1,dJ)));
resetGame();
draw();
}
// Default load
try { rebuildFromMatrix(parseMap(mapText.value)); } catch(e){ console.error(e); }
// Controls
let running=false, paused=false;
const keys = {l:false,r:false,u:false,d:false};
// Stop agent helper
function stopAgent(reason = ""){
abortAgent = true;
training = false;
agentEl.checked = false;
if(reason) stats.textContent = reason;
}
function setKey(e, down){
const k = e.key || e.code;
// Always allow pause and reset
if(down){
if(k==='p' || k==='P'){
paused = !paused;
}
if(k==='r' || k==='R'){
if(training || agentEl.checked) stopAgent("Agent stopped by Reset.");
resetGame();
}
}
// Block manual movement when agent is on or frozen
const blockMove = agentEl.checked || freezeEl.checked;
if(!blockMove){
if(k==='ArrowLeft'||k==='Left'){ keys.l=down; e.preventDefault(); }
if(k==='ArrowRight'||k==='Right'){ keys.r=down; e.preventDefault(); }
if(k==='ArrowUp'||k==='Up'){ keys.u=down; e.preventDefault(); }
if(k==='ArrowDown'||k==='Down'){ keys.d=down; e.preventDefault(); }
}
}
cvs.tabIndex=0;
cvs.addEventListener('keydown', e=>setKey(e,true));
cvs.addEventListener('keyup', e=>setKey(e,false));
document.addEventListener('keydown', e=>{ if(document.activeElement===cvs) setKey(e,true); });
document.addEventListener('keyup', e=>{ if(document.activeElement===cvs) setKey(e,false); });
cvs.addEventListener('mousedown', ()=>cvs.focus());
loadMapBtn.onclick = ()=>{
try{
const M = parseMap(mapText.value);
Q = new Map(); stats.textContent = "Q-table cleared.";
rebuildFromMatrix(M);
}catch(err){
alert("Parse error: " + err.message);
}
};
// Movement and RL
const ACTIONS = [{di:-1,dj:0},{di:1,dj:0},{di:0,dj:1},{di:0,dj:-1}];
function canMove(i,j){ return !(i<0||i>=NT||j<0||j>=NX||walls[i][j]); }
// Rewards
function reward(i,j){
if(i===trueOpt.i && j===trueOpt.j) return 100;
if(i===decoy.i && j===decoy.j) return -50;
return -1;
}
// Q table
let Q = new Map(); // "i,j" -> Float32Array(4)
function qGet(i,j){ const k=`${i},${j}`; if(!Q.has(k)) Q.set(k,new Float32Array(4)); return Q.get(k); }
function argmax(a){ let m=a[0], mi=0; for(let k=1;k<a.length;k++){ if(a[k]>m){m=a[k]; mi=k;} } return mi; }
// Episode stats
let epSteps=0, epReturn=0, episodes=0, experiments=0;
let bestAt={i:0,j:0}, bestVal=0;
function resetGame(){
// start at first open on left edge else any open
start = {i:NT-1, j:0};
if(walls[start.i][start.j]){
let found=false;
for(let ii=NT-1; ii>=0; ii--){
if(!walls[ii][0]){ start={i:ii,j:0}; found=true; break; }
}
if(!found){
outer: for(let ii=NT-1; ii>=0; ii--) for(let jj=0; jj<NX; jj++) if(!walls[ii][jj]){ start={i:ii,j:jj}; break outer; }
}
}
s = {...start};
epSteps=0; epReturn=0; experiments=0;
bestAt = {...s}; bestVal = EV[s.i][s.j];
paused=false;
}
function agentStep(){
const eps = Number(epsEl.value), alpha = Number(alphaEl.value), gamma = Number(gammaEl.value);
const q = qGet(s.i,s.j);
const aIdx = Math.random()<eps ? Math.floor(Math.random()*ACTIONS.length) : argmax(q);
const a = ACTIONS[aIdx];
let ni=s.i+a.di, nj=s.j+a.dj;
if(!canMove(ni,nj)){ ni=s.i; nj=s.j; }
const r = reward(ni,nj);
const q2 = qGet(ni,nj);
const tdTarget = r + gamma * Math.max(q2[0],q2[1],q2[2],q2[3]);
q[aIdx] = q[aIdx] + alpha * (tdTarget - q[aIdx]);
s={i:ni,j:nj};
epSteps++; epReturn+=r; experiments++;
const val = EV[s.i][s.j]; if(val>bestVal){ bestVal=val; bestAt={...s}; }
}
let tick=0;
function humanStep(){
tick=(tick+1)%8; if(tick!==0) return;
let ni=s.i, nj=s.j;
if(keys.l) nj--; if(keys.r) nj++; if(keys.u) ni--; if(keys.d) ni++;
if(canMove(ni,nj)){
s={i:ni,j:nj}; experiments++;
const val = EV[s.i][s.j]; if(val>bestVal){ bestVal=val; bestAt={...s}; }
}
}
// Drawing
function colorFor(v){
if(v<=0) return "#000";
const t = Math.max(0, Math.min(1, v));
const r = Math.floor(255 * Math.min(1, Math.max(0, 2*(t-0.5))));
const g = Math.floor(255 * Math.min(1, Math.max(0, 2*t)));
const b = Math.floor(255 * Math.min(1, Math.max(0, 1-2*t)));
return `rgb(${r},${g},${b})`;
}
function draw(){
// sizes
CELL = Math.floor(Math.min(cvs.width/NX, cvs.height/NT));
ORGX = Math.floor((cvs.width - CELL*NX)/2);
ORGY = Math.floor((cvs.height - CELL*NT)/2);
// cells
for(let i=0;i<NT;i++){
for(let j=0;j<NX;j++){
const v = walls[i][j] ? 0 : EV[i][j];
ctx.fillStyle = v<=0 ? "#000" : colorFor(v);
ctx.fillRect(ORGX+j*CELL, ORGY+i*CELL, CELL, CELL);
}
}
// grid
ctx.strokeStyle = "rgba(255,255,255,.08)";
for(let i=0;i<=NT;i++){ ctx.beginPath(); ctx.moveTo(ORGX, ORGY+i*CELL); ctx.lineTo(ORGX+NX*CELL, ORGY+i*CELL); ctx.stroke(); }
for(let j=0;j<=NX;j++){ ctx.beginPath(); ctx.moveTo(ORGX+j*CELL, ORGY); ctx.lineTo(ORGX+j*CELL, ORGY+NT*CELL); ctx.stroke(); }
// goals
ctx.fillStyle="#ffdd57"; ctx.fillRect(ORGX+trueOpt.j*CELL+CELL*0.25, ORGY+trueOpt.i*CELL+CELL*0.25, CELL*0.5, CELL*0.5);
ctx.fillStyle="#ff6b6b"; ctx.fillRect(ORGX+decoy.j*CELL+CELL*0.3, ORGY+decoy.i*CELL+CELL*0.3, CELL*0.4, CELL*0.4);
// best so far (yellow ring)
ctx.strokeStyle="#ffd84d"; ctx.lineWidth=Math.max(2, CELL*0.09);
ctx.beginPath();
ctx.arc(ORGX+bestAt.j*CELL+CELL/2, ORGY+bestAt.i*CELL+CELL/2, CELL*0.32, 0, Math.PI*2);
ctx.stroke();
// current (orange dot)
ctx.fillStyle="#ff8800";
ctx.beginPath();
ctx.arc(ORGX+s.j*CELL+CELL/2, ORGY+s.i*CELL+CELL/2, CELL*0.28, 0, Math.PI*2);
ctx.fill();
// HUD
const here = EV[s.i][s.j].toFixed(3), best = EV[bestAt.i][bestAt.j].toFixed(3);
hud.textContent = `Experiments: ${experiments} | Here cell=(${s.i},${s.j}) yield≈${here} | Best cell=(${bestAt.i},${bestAt.j}) yield≈${best}`;
}
function onEpisodeEnd(kind){
episodes += 1;
stats.textContent = `Episodes: ${episodes} | Steps: ${epSteps} | Return: ${epReturn.toFixed(2)} | Q-states: ${Q.size} | End: ${kind}`;
if(autoEl.checked){ resetGame(); running=true; } else { running=false; }
}
function update(){
if(agentEl.checked && !freezeEl.checked) agentStep(); else humanStep();
if(agentEl.checked){
if(s.i===trueOpt.i && s.j===trueOpt.j) onEpisodeEnd("true");
else if(s.i===decoy.i && s.j===decoy.j) onEpisodeEnd("decoy");
}
}
function loop(){ if(running && !paused) update(); draw(); requestAnimationFrame(loop); }
// Buttons
startBtn.onclick=()=>{ running=true; paused=false; cvs.focus(); };
pauseBtn.onclick=()=>{ if(running){ paused=!paused; cvs.focus(); } };
resetBtn.onclick=()=>{ if(training || agentEl.checked) stopAgent("Agent stopped by Reset."); resetGame(); cvs.focus(); };
// Disable agent mid training
agentEl.addEventListener('change', ()=>{
if(!agentEl.checked && training){
stopAgent("Agent disabled.");
}
});
function resetQ(){ Q = new Map(); stats.textContent = "Q-table cleared."; }
resetQBtn.onclick = resetQ;
async function runEpisode(maxSteps=2000){
const prevAuto = autoEl.checked; autoEl.checked=false;
const prevRun=running, prevPause=paused, prevAgent=agentEl.checked, prevFreeze=freezeEl.checked;
agentEl.checked = true; freezeEl.checked = false;
resetGame(); running = true; paused = false;
let steps=0;
abortAgent = false;
training = true;
await new Promise(resolve=>{
function cleanup(){
const endKind = (s.i===trueOpt.i && s.j===trueOpt.j) ? "true" : ((s.i===decoy.i && s.j===decoy.j) ? "decoy" : "limit");
onEpisodeEnd(endKind);
running=prevRun; paused=prevPause; agentEl.checked=prevAgent && !abortAgent; freezeEl.checked=prevFreeze; autoEl.checked=prevAuto;
training = false;
}
function tick(){
if(abortAgent){
cleanup();
resolve();
return;
}
if(paused){
requestAnimationFrame(tick);
return;
}
if(steps>=maxSteps || (s.i===trueOpt.i && s.j===trueOpt.j) || (s.i===decoy.i && s.j===decoy.j)){
cleanup();
resolve();
return;
}
agentStep(); draw(); steps++; requestAnimationFrame(tick);
}
requestAnimationFrame(tick);
});
}
// Train buttons
train1.onclick = async ()=>{ await runEpisode(1200); };
train50.onclick = async ()=>{
for(let k=0;k<50;k++){
if(abortAgent) break;
await runEpisode(1200);
}
};
// Init
resetGame();
loop();
})();
</script>
""")
Define wall map (0 = wall, 1 = open)
Reinforcement Learning demo
Q(s,a) ← Q(s,a) + α[r + γ max_a' Q(s',a') − Q(s,a)].
3. Q-learning on a Chemistry Grid#
Similar to the Demo 3, this part we build a \((T,x)\) grid environment in Python.
It places two reward peaks (true and decoy) and scripted walls separating regions.
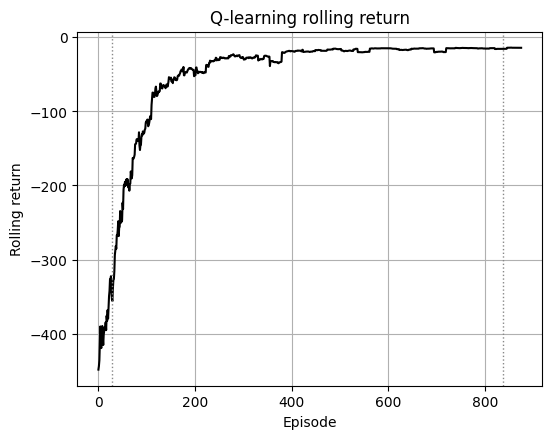
We train tabular Q-learning with decaying ε and compare:
Early Q-table: prefers the nearby decoy (shorter but worse path)
Late Q-table: learns the long path to the true optimum
Why? Early training underestimates distant rewards.
As updates propagate, the agent learns that long paths with small penalties lead to higher return overall.
Show code cell source
# Q-learning on a chemistry (T, x) grid
# Visual proof: there is a path to the true goal (BFS in green),
# early policy goes to decoy, late policy learns the true goal.
import numpy as np
import matplotlib.pyplot as plt
from collections import deque
rng = np.random.default_rng(123)
plt.rcParams["figure.figsize"] = (6.0, 4.6)
plt.rcParams["axes.grid"] = True
# ---- Chemistry-like surface with two centers (one high, one medium) ----
def true_yield(T, x):
T0_1, x0_1 = 115.0, 0.30 # high
T0_2, x0_2 = 137.0, 0.72 # medium
h1, wT1, wx1 = 0.90, 12.0, 0.05
h2, wT2, wx2 = 0.50, 14.0, 0.08
base = 0.10
g1 = h1*np.exp(-0.5*((T - T0_1)/wT1)**2 - 0.5*((x - x0_1)/wx1)**2)
g2 = h2*np.exp(-0.5*((T - T0_2)/wT2)**2 - 0.5*((x - x0_2)/wx2)**2)
return base + g1 + g2
def expected_value(T, x):
return true_yield(T, x) - 0.15*x
# ---- Fixed-wall environment with two reachable goals ----
class ChemGrid:
"""
Actions: 0 up (T-), 1 right (x+), 2 down (T+), 3 left (x-)
Reward: -1 per step, 0 at true goal, -5 at decoy goal
Walls block movement. Pushing into a wall keeps you in place.
"""
def __init__(self, T_vals, x_vals, start_mode="bottom_right"):
self.T_vals = np.array(T_vals)
self.x_vals = np.array(x_vals)
self.nT, self.nx = len(T_vals), len(x_vals)
self.nS, self.nA = self.nT*self.nx, 4
Tm, Xm = np.meshgrid(self.T_vals, self.x_vals, indexing="ij")
self.EV = expected_value(Tm, Xm)
# Place goals by EV peaks
gi, gj = np.unravel_index(np.argmax(self.EV), self.EV.shape)
self.true_goal = (gi, gj)
# second peak far from true
self.decoy_goal = self._second_peak_far_from(self.true_goal, sep=0.35)
# Scripted wall layout that separates regions but leaves gates
self.wall_mask = self._build_scripted_walls()
# Snap goals to open if needed
self.true_goal = self._nearest_open(self.true_goal)
self.decoy_goal = self._nearest_open(self.decoy_goal)
# Start
self.start = self._nearest_open(self._pick_start(start_mode))
# Verify both are reachable. If not, open extra gates.
self._ensure_connectivity(self.start, self.true_goal)
self._ensure_connectivity(self.start, self.decoy_goal)
self.reset()
def _pick_start(self, mode):
corners = {
"bottom_right": (self.nT-1, self.nx-1),
"bottom_left": (self.nT-1, 0),
"top_left": (0, 0),
"top_right": (0, self.nx-1),
}
return corners.get(mode, (self.nT-1, self.nx-1))
def _second_peak_far_from(self, avoid_ij, sep=0.35):
ai, aj = avoid_ij
EV = self.EV.copy()
EV[max(0,ai-1):min(self.nT,ai+2), max(0,aj-1):min(self.nx,aj+2)] = -np.inf
best = None; best_score = -np.inf
for i in range(self.nT):
for j in range(self.nx):
if not np.isfinite(EV[i,j]): continue
d = np.hypot((i-ai)/self.nT, (j-aj)/self.nx)
if d < sep: continue
if EV[i,j] > best_score:
best_score = EV[i,j]; best = (i,j)
if best is None:
best = np.unravel_index(np.argmax(EV), EV.shape)
return best
def _build_scripted_walls(self):
W = np.zeros((self.nT, self.nx), dtype=bool)
# Serpentine barrier across the grid
mid = int(self.nT*0.48)
for j in range(self.nx):
wiggle = int(3*np.sin(j*np.pi/6.0))
for k in range(-2, 3):
i = mid + wiggle + k
if 0 <= i < self.nT:
W[i, j] = True
# Gates in the barrier
gate_cols = [4, 10, 17, 22]
for g in gate_cols:
for r in [-1, 0, 1]:
i = mid + r + int(3*np.sin(g*np.pi/6.0))
if 0 <= i < self.nT:
W[i, g] = False
# Extra maze lines near the decoy side
for i in range(4, self.nT-4, 2):
W[i, int(self.nx*0.72)] = True
for j in range(int(self.nx*0.60), self.nx-2, 3):
W[int(self.nT*0.75), j] = True
# Do not wall the goals
ti, tj = np.unravel_index(np.argmax(self.EV), self.EV.shape)
W[ti, tj] = False
di, dj = self._second_peak_far_from((ti, tj), sep=0.35)
W[di, dj] = False
return W
def _nearest_open(self, ij):
i0, j0 = ij
if not self.wall_mask[i0, j0]:
return (i0, j0)
q = deque([ij]); seen = {ij}
while q:
i, j = q.popleft()
for di, dj in [(-1,0),(1,0),(0,-1),(0,1)]:
ni, nj = i+di, j+dj
if ni<0 or nj<0 or ni>=self.nT or nj>=self.nx: continue
if (ni, nj) in seen: continue
if not self.wall_mask[ni, nj]:
return (ni, nj)
seen.add((ni, nj)); q.append((ni, nj))
return ij
def _connected(self, src, dst):
si, sj = src; ti, tj = dst
if self.wall_mask[si, sj] or self.wall_mask[ti, tj]: return False
q = deque([src]); seen = {src}
while q:
i, j = q.popleft()
if (i, j) == (ti, tj): return True
for di, dj in [(-1,0),(1,0),(0,-1),(0,1)]:
ni, nj = i+di, j+dj
if ni<0 or nj<0 or ni>=self.nT or nj>=self.nx: continue
if (ni, nj) in seen or self.wall_mask[ni, nj]: continue
seen.add((ni, nj)); q.append((ni, nj))
return False
def _ensure_connectivity(self, src, dst):
# Open the closest barrier cells until connected
if self._connected(src, dst):
return
# carve a straight tunnel along x
si, sj = src; ti, tj = dst
jdir = 1 if tj >= sj else -1
for j in range(sj, tj + jdir, jdir):
self.wall_mask[si, j] = False
# carve along y
idir = 1 if ti >= si else -1
for i in range(si, ti + idir, idir):
self.wall_mask[i, tj] = False
def reset(self):
self.s = tuple(self.start)
return self.s
def idx(self, s):
i, j = s
return i*self.nx + j
def step(self, a):
i, j = self.s
ni, nj = i, j
if a == 0: ni = max(0, i-1) # up
elif a == 1: nj = min(self.nx-1, j+1) # right
elif a == 2: ni = min(self.nT-1, i+1) # down
elif a == 3: nj = max(0, j-1) # left
if self.wall_mask[ni, nj]:
ni, nj = i, j
done = False
if (ni, nj) == self.true_goal:
r = 0.0; done = True
elif (ni, nj) == self.decoy_goal:
r = -5.0; done = True
else:
r = -1.0
self.s = (ni, nj)
return self.s, float(r), bool(done), {}
# Build environment as usual
T_vals = np.linspace(80, 160, 25)
x_vals = np.linspace(0.0, 1.0, 25)
env = ChemGrid(T_vals, x_vals, start_mode="bottom_right")
def set_start_only(env, T_target, x_target):
# find nearest grid indices to the desired coordinates
iT = int(np.argmin(np.abs(env.T_vals - T_target)))
jX = int(np.argmin(np.abs(env.x_vals - x_target)))
# snap to an open cell but do NOT rebuild walls or goals
if hasattr(env, "_nearest_open"):
env.start = env._nearest_open((iT, jX))
else:
env.start = (iT, jX)
env.reset()
set_start_only(env, T_target=150.0, x_target=0.95)
# optional: sanity check that EV and goals did not change
print("true goal:", env.true_goal, "decoy:", env.decoy_goal)
# ---- BFS shortest path to the true goal (to prove reachability) ----
def bfs_shortest_path(src, dst, walls):
si, sj = src; ti, tj = dst
q = deque([src]); parent = {src: None}
while q:
i, j = q.popleft()
if (i, j) == (ti, tj):
# reconstruct
path = []
cur = (ti, tj)
while cur is not None:
path.append(cur)
cur = parent[cur]
path.reverse()
return path
for di, dj in [(-1,0),(1,0),(0,-1),(0,1)]:
ni, nj = i+di, j+dj
if ni<0 or nj<0 or ni>=env.nT or nj>=env.nx: continue
if walls[ni, nj]: continue
if (ni, nj) in parent: continue
parent[(ni, nj)] = (i, j)
q.append((ni, nj))
return None
shortest_true = bfs_shortest_path(env.start, env.true_goal, env.wall_mask)
# ---- Q-learning helpers with snapshots ----
def eps_greedy(q_row, eps, local_rng):
if local_rng.random() < eps:
return int(local_rng.integers(0, len(q_row)))
mx = np.max(q_row)
cand = np.where(np.isclose(q_row, mx))[0]
return int(local_rng.choice(cand))
def run_episode(Q, alpha=0.22, gamma=0.985, eps=0.3, seed=None, max_steps=700):
if seed is None:
seed = int(rng.integers(0, 10_000))
local = np.random.default_rng(seed)
s = env.reset()
G = 0.0
for _ in range(max_steps):
si = env.idx(s)
a = eps_greedy(Q[si], eps, local)
s2, r, done, _ = env.step(a)
si2 = env.idx(s2)
Q[si, a] += alpha * (r + gamma * Q[si2].max() - Q[si, a])
G += r
s = s2
if done: break
return Q, G
def train_with_snapshots(episodes=900, eps0=0.7, eps_min=0.05, tau=350.0,
alpha=0.22, gamma=0.985, snaps=(40, 850)):
Q = np.zeros((env.nS, env.nA), dtype=np.float32)
base = np.random.default_rng(7)
returns = []
Q_early = None
for ep in range(1, episodes+1):
eps = max(eps_min, eps0 * np.exp(-ep/tau))
Q, G = run_episode(Q, alpha=alpha, gamma=gamma, eps=eps,
seed=int(base.integers(0, 1_000_000)))
returns.append(G)
if ep == snaps[0]:
Q_early = Q.copy()
Q_late = Q.copy()
return Q_early, Q_late, np.array(returns), snaps
Q_early, Q_late, ret, snaps = train_with_snapshots()
# ---- Greedy rollouts ----
def rollout(Q, max_steps=400):
s = env.reset()
path = [s]
for _ in range(max_steps):
a = int(np.argmax(Q[env.idx(s)]))
s2, r, done, _ = env.step(a)
path.append(s2)
s = s2
if done: break
return path
path_early = rollout(Q_early)
path_late = rollout(Q_late)
# ---- Plot 0: rolling return with snapshot markers ----
roll = np.convolve(ret, np.ones(25)/25, mode="valid")
plt.plot(roll, c="k")
for s in snaps:
x = max(0, s - 25//2)
plt.axvline(x=x, color="#888", lw=1, ls=":")
plt.xlabel("Episode")
plt.ylabel("Rolling return")
plt.title("Q-learning rolling return")
plt.show()
# ---- Plot 2 and 3: early vs late greedy trajectories ----
def panel(ax, path, color, title):
cs = ax.contourf(env.T_vals, env.x_vals, env.EV.T, levels=32)
if title.endswith("(early)"): # colorbar on left panel
plt.colorbar(cs, ax=ax, pad=0.01, label="expected net value")
wi, wj = np.where(env.wall_mask)
ax.scatter(env.T_vals[wi], env.x_vals[wj], s=18, c="k", marker="s")
Ti = [env.T_vals[i] for i, j in path]
Xi = [env.x_vals[j] for i, j in path]
ax.plot(Ti, Xi, "-o", c=color, lw=2, ms=3, label="greedy path")
ax.plot(env.T_vals[env.start[0]], env.x_vals[env.start[1]], "o", ms=8, c="#ff8800", label="Start")
ax.add_patch(plt.Rectangle((env.T_vals[env.true_goal[0]]-1.2, env.x_vals[env.true_goal[1]]-0.05),
2.4, 0.10, color="#ffdd57", label="True goal"))
ax.add_patch(plt.Rectangle((env.T_vals[env.decoy_goal[0]]-1.2, env.x_vals[env.decoy_goal[1]]-0.05),
2.4, 0.10, color="#ff6b6b", label="Decoy goal"))
ax.set_xlabel("T [°C]"); ax.set_ylabel("x")
ax.set_title(title)
end_early = path_early[-1]
end_late = path_late[-1]
early_tag = "decoy" if end_early == env.decoy_goal else ("true" if end_early == env.true_goal else "none")
late_tag = "true" if end_late == env.true_goal else ("decoy" if end_late == env.decoy_goal else "none")
fig, axs = plt.subplots(1, 2, figsize=(12, 5.6), sharex=True, sharey=True)
panel(axs[0], path_early, "#e74c3c", f"Greedy trajectory (early) → {early_tag}")
panel(axs[1], path_late, "#2980b9", f"Greedy trajectory (late) → {late_tag}")
# single legend bottom
handles, labels = [], []
for ax in axs:
h, l = ax.get_legend_handles_labels()
handles += h; labels += l
seen = set(); H = []; L = []
for h, l in zip(handles, labels):
if l in seen: continue
seen.add(l); H.append(h); L.append(l)
fig.legend(H, L, loc="lower center", bbox_to_anchor=(0.5, -0.04), ncol=4)
plt.tight_layout()
plt.show()
# ---- Plot 1: EV + walls + both goals + BFS shortest path to true ----
EV = env.EV
fig, ax = plt.subplots(figsize=(7.2, 6.2))
cs = ax.contourf(env.T_vals, env.x_vals, env.EV.T, levels=32)
plt.colorbar(cs, ax=ax, pad=0.01, label="expected net value")
# walls
wi, wj = np.where(env.wall_mask)
ax.scatter(env.T_vals[wi], env.x_vals[wj], s=18, c="k", marker="s")
# goals and start
ax.plot(env.T_vals[env.start[0]], env.x_vals[env.start[1]], "o", ms=8, c="#ff8800", label="Start")
ax.add_patch(plt.Rectangle((env.T_vals[env.true_goal[0]]-1.2, env.x_vals[env.true_goal[1]]-0.05),
2.4, 0.10, color="#ffdd57", label="True goal"))
ax.add_patch(plt.Rectangle((env.T_vals[env.decoy_goal[0]]-1.2, env.x_vals[env.decoy_goal[1]]-0.05),
2.4, 0.10, color="#ff6b6b", label="Decoy goal"))
# shortest path to true
if shortest_true is not None:
Ti = [env.T_vals[i] for i, j in shortest_true]
Xi = [env.x_vals[j] for i, j in shortest_true]
ax.plot(Ti, Xi, "-", c="#2ecc71", lw=2.5, label="Shortest path to true (BFS)")
ax.set_xlabel("T [°C]")
ax.set_ylabel("x")
ax.set_title("There is a route to the true goal")
ax.legend(loc="lower center", bbox_to_anchor=(0.5, -0.12), ncol=3)
plt.tight_layout()
plt.show()
true goal: (11, 7) decoy: (17, 17)
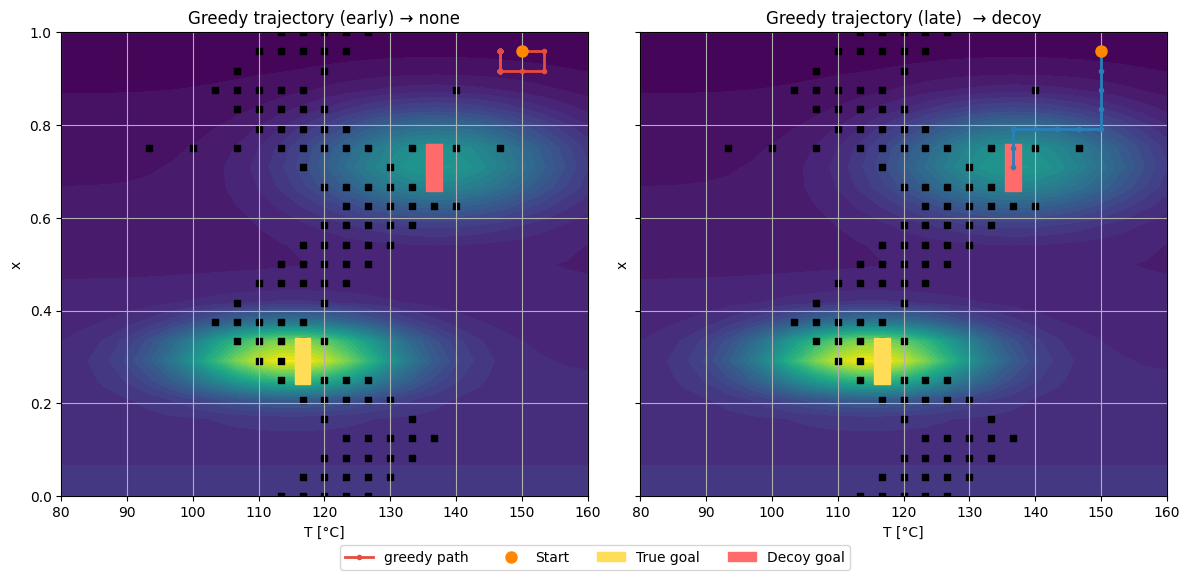
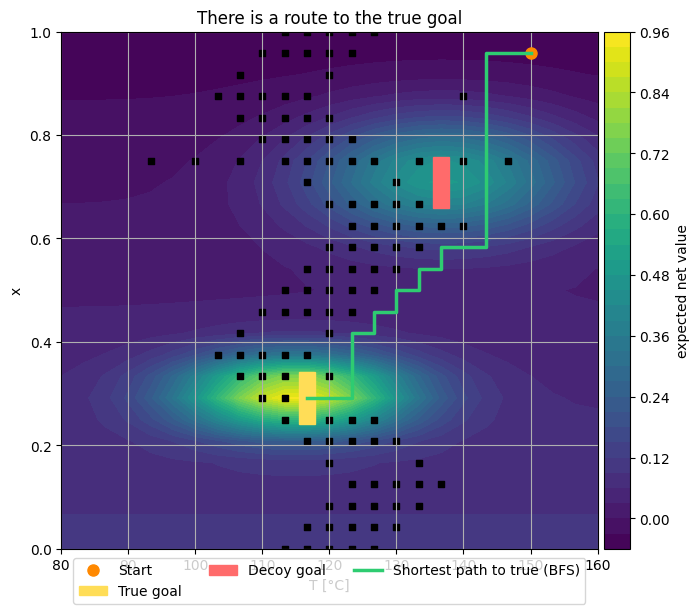
Early training has fewer updates. The path to the true goal is long and costs many -1 steps before the +100 reward at the goal.
The decoy has a terminal penalty (for example −50) but may sit behind short corridors. Early Q often overestimates short routes and underestimates long ones. Greedy on an undertrained Q picks the locally better-looking path, which is often the decoy.
Note
With more episodes the updates push up Q along the route to the true goal and push down Q around the decoy due to its terminal penalty. Then greedy flips to the true route.
4. Bridge to Multi-Armed Bandits#
In chemical research we often choose the next experiment anywhere in the space, informed by past data (as in Bayesian optimization and active learning we learned in the previous lecture). Unlike a reinforcement learning (RL) grid world shown above, in practice it’s less frequent that we move only to neighboring conditions (like “up”, “down”, “left”, “right”) after each reaction.
Instead, every experiment can be any point in the search space.
Because there is no meaningful notion of “current position” (enviroment), we can simplify the RL setup:
there is effectively only one state that repeats each round.
This simplification leads to the multi-armed bandit formulation.
Under this one-state bandit setting, think about doing experiment in your lab like going to casino, we have \(K\) possible actions (arms), each representing an experimental condition such as a catalyst, solvent, or temperature combination.
Each arm \(i\) has an unknown expected reward \(\mu_i\) (e.g., expected yield) for different reactions (for example, reaction time 12h give an average reaction yield for suzuki coupling on 70% for 100 substrates, while 200C only give 10% success rate for the same pool of substrates).
At each trial \(t = 1, 2, \dots, T\):
Select an arm \(A_t \in \{1, \dots, K\}\)
Observe a reward \(R_t\) drawn from a distribution with mean \(\mu_{A_t}\)
Update your estimates based on what you learned
The objective is to maximize the total reward:
or equivalently, to minimize the regret, which measures how much we lose compared to always picking the best arm:
Below is a mini-game to give you an idea of this:
Each arm (catalyst or condition) is like a slot machine with an unknown payout probability.
You can pull one arm per round — that’s one experiment.
After observing the outcome (success or yield), update your belief about that arm.
Decide whether to explore new arms or exploit the best one so far.
Show code cell source
from IPython.display import HTML
HTML(r"""
<div id="bandit-chemlab" style="font-family: ui-sans-serif, system-ui, -apple-system, Segoe UI, Roboto, Helvetica, Arial; color:#e6e6e6;">
<div style="background:#0b1021;border:1px solid #1e2a44;border-radius:12px;padding:14px;box-shadow:0 8px 24px rgba(0,0,0,.35);">
<h3 style="margin:0 0 .4rem 0;color:#ffd84d;">ChemLab: explore vs exploit</h3>
<p style="margin:.2rem 0 1rem 0;opacity:.95">
You are screening <b>catalysts</b> for a reaction. Each catalyst has an unknown success rate (yield).
You can run one experiment per round. Try a strategy:
<b>explore</b> new catalysts to learn their true performance or <b>exploit</b> the best one you know so far.
Compare strategies and watch how average yield and regret evolve.
</p>
<div style="display:flex;flex-wrap:wrap;gap:12px;align-items:flex-start;">
<!-- Controls -->
<div style="flex:1 1 280px;min-width:280px;background:#0f1329;border:1px solid #1f2a48;border-radius:10px;padding:10px;">
<div style="display:flex;gap:8px;flex-wrap:wrap;align-items:center;margin-bottom:8px;">
<span>Mode:</span>
<label style="display:flex;align-items:center;gap:.35rem;"><input type="radio" name="algo" value="Manual" checked> Manual</label>
<label style="display:flex;align-items:center;gap:.35rem;"><input type="radio" name="algo" value="Eps"> ε-greedy</label>
<label style="display:flex;align-items:center;gap:.35rem;"><input type="radio" name="algo" value="UCB"> UCB1</label>
<label style="display:flex;align-items:center;gap:.35rem;"><input type="radio" name="algo" value="TS"> Thompson</label>
</div>
<div id="panel-eps" style="display:none;margin:.3rem 0 .4rem 0;">
<label>ε explore:
<input id="epsSlider" type="range" min="0" max="1" step="0.01" value="0.10">
<span id="epsVal">0.10</span>
</label>
</div>
<div style="display:flex;gap:8px;flex-wrap:wrap;align-items:center;margin:.6rem 0;">
<label>Steps/run:
<input id="stepsSlider" type="range" min="1" max="300" step="1" value="5">
<span id="stepsVal">50</span>
</label>
</div>
<div style="display:flex;gap:8px;flex-wrap:wrap;margin-top:.2rem;">
<button id="runBtn" style="padding:.4rem .7rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Run agent</button>
<button id="stepBtn" style="padding:.4rem .7rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Step 1</button>
<button id="resetBtn" style="padding:.4rem .7rem;border:1px solid #222;border-radius:.5rem;background:#111;color:#eee;cursor:pointer;">Reset</button>
<label style="margin-left:auto;display:flex;align-items:center;gap:.35rem;">
<input id="revealChk" type="checkbox"> Reveal true yields
</label>
</div>
<div style="margin-top:.6rem;font-size:.95rem;opacity:.9;line-height:1.35;">
<b>Keys</b>: press 1..8 to test a catalyst in Manual mode.
<b>Story</b>: think of each catalyst as a recipe variant with its own success rate.
Your goal is to maximize average yield while keeping regret low.
</div>
</div>
<!-- Charts -->
<div style="flex:2 1 520px;min-width:520px;display:grid;grid-template-columns:1fr 1fr;gap:12px;">
<div style="background:#0f1329;border:1px solid #1f2a48;border-radius:10px;padding:10px;">
<div style="display:flex;justify-content:space-between;align-items:center;margin-bottom:6px;">
<div>Estimated yield by catalyst</div>
<div id="labelline" style="opacity:.8;font-size:.9rem;"></div>
</div>
<canvas id="barChart" width="520" height="300" style="width:100%;height:auto;display:block;background:#0b1021;border-radius:8px;"></canvas>
<div style="margin-top:6px;opacity:.8;">Click a bar in Manual mode to run that experiment.</div>
</div>
<div style="background:#0f1329;border:1px solid #1f2a48;border-radius:10px;padding:10px;">
<div>Average yield and cumulative regret</div>
<canvas id="lineChart" width="520" height="300" style="width:100%;height:auto;display:block;background:#0b1021;border-radius:8px;"></canvas>
<div style="margin-top:6px;opacity:.8;"><span style="color:#91d5ff;">Avg yield</span> should climb. <span style="color:#ffa39e;">Regret</span> should grow more slowly when you find the best catalyst.</div>
</div>
</div>
</div>
</div>
</div>
<script>
(() => {
// ---------- Helpers ----------
const clamp = (v, lo, hi)=>Math.max(lo, Math.min(hi, v));
function randChoice(arr){ return arr[Math.floor(Math.random()*arr.length)]; }
// ---------- Environment: Bernoulli bandit in chemistry flavor ----------
// 8 catalysts with fixed true success rates (hidden)
const labels = ["Cat A","Cat B","Cat C","Cat D","Cat E","Cat F","Cat G","Cat H"];
const trueP = (()=>{
// One clearly best, one close, rest mixed
return [0.78, 0.72, 0.48, 0.44, 0.36, 0.30, 0.25, 0.18];
})();
const K = trueP.length;
const bestIdx = trueP.indexOf(Math.max(...trueP));
// ---------- State ----------
let t = 0;
let est = Array(K).fill(0); // running mean per arm
let pulls = Array(K).fill(0); // count per arm
let postA = Array(K).fill(1); // Thompson alpha
let postB = Array(K).fill(1); // Thompson beta
let rewards = []; // 0/1 outcomes
let regret = []; // cumulative regret
let cumReward = 0;
// UI refs
const barCanvas = document.getElementById("barChart");
const lineCanvas = document.getElementById("lineChart");
const ctxBar = barCanvas.getContext("2d");
const ctxLine = lineCanvas.getContext("2d");
const labelline = document.getElementById("labelline");
const epsSlider = document.getElementById("epsSlider");
const epsVal = document.getElementById("epsVal");
const stepsSlider = document.getElementById("stepsSlider");
const stepsVal = document.getElementById("stepsVal");
const revealChk = document.getElementById("revealChk");
const runBtn = document.getElementById("runBtn");
const stepBtn = document.getElementById("stepBtn");
const resetBtn = document.getElementById("resetBtn");
const radioAlgos = [...document.querySelectorAll('input[name="algo"]')];
const panelEps = document.getElementById("panel-eps");
// ---- UI sync
epsSlider.oninput = ()=> epsVal.textContent = Number(epsSlider.value).toFixed(2);
stepsSlider.oninput = ()=> stepsVal.textContent = stepsSlider.value;
epsVal.textContent = Number(epsSlider.value).toFixed(2);
stepsVal.textContent = stepsSlider.value;
function getAlgo(){
const a = radioAlgos.find(r=>r.checked).value;
return a;
}
radioAlgos.forEach(r => r.onchange = ()=>{
panelEps.style.display = (getAlgo()==="Eps") ? "block" : "none";
});
// ---------- Algorithms ----------
function actEpsGreedy(){
const eps = Number(epsSlider.value);
if(Math.random() < eps){
return Math.floor(Math.random()*K);
}
const m = Math.max(...est);
const cand = [];
for(let i=0;i<K;i++) if(Math.abs(est[i]-m)<1e-12) cand.push(i);
return randChoice(cand);
}
function actUCB1(){
// Pull each arm once at start
for(let i=0;i<K;i++) if(pulls[i]===0) return i;
const logt = Math.log(t+1);
let best = -1, bestVal = -Infinity;
for(let i=0;i<K;i++){
const bonus = Math.sqrt(2*logt / pulls[i]);
const ucb = est[i] + bonus;
if(ucb > bestVal - 1e-12){ bestVal = ucb; best = i; }
}
return best;
}
function actThompson(){
let samples = [];
for(let i=0;i<K;i++){
// simple Beta sampler using Math.random + inverse CDF approx is heavy; use JS gamma trick
// Here we approximate with many small sum uniforms for simplicity
// Quick and light: sample using library-free approximation
const a = postA[i], b = postB[i];
// Cheng's algorithm would be better, but for teaching this light approx is fine
// Fallback: draw 100 uniforms and average to get a rough rank
let sA=0, sB=0;
for(let k=0;k<Math.max(2, Math.floor(a));k++) sA += Math.random();
for(let k=0;k<Math.max(2, Math.floor(b));k++) sB += Math.random();
const betaLike = sA/(sA+sB+1e-9);
samples.push(betaLike);
}
const m = Math.max(...samples);
const cand = [];
for(let i=0;i<K;i++) if(Math.abs(samples[i]-m)<1e-12) cand.push(i);
return randChoice(cand);
}
// ---------- One round ----------
function bernoulliDraw(p){ return Math.random() < p ? 1 : 0; }
function stepOnce(action){
const r = bernoulliDraw(trueP[action]);
t += 1;
cumReward += r;
const bestMean = trueP[bestIdx];
regret.push(bestMean*t - cumReward);
// update estimates
pulls[action] += 1;
const n = pulls[action];
est[action] += (r - est[action]) / n;
// update Thompson posterior
postA[action] += r;
postB[action] += 1 - r;
rewards.push(r);
}
// ---------- Drawing ----------
function drawBars(){
const W = barCanvas.width, H = barCanvas.height;
ctxBar.clearRect(0,0,W,H);
// axes
ctxBar.strokeStyle = "#243042"; ctxBar.lineWidth = 1;
ctxBar.beginPath(); ctxBar.moveTo(40,10); ctxBar.lineTo(40,H-30); ctxBar.lineTo(W-10,H-30); ctxBar.stroke();
const maxY = 1.0;
const plotW = W-60, plotH = H-50;
const bw = plotW / K * 0.7;
const gap = plotW / K * 0.3;
const x0 = 40 + gap*0.5;
// gridlines
ctxBar.strokeStyle = "rgba(255,255,255,.06)";
for(let y=0;y<=10;y++){
const yy = 10 + plotH - plotH*(y/10);
ctxBar.beginPath(); ctxBar.moveTo(40, yy); ctxBar.lineTo(W-10, yy); ctxBar.stroke();
}
// bars
for(let i=0;i<K;i++){
const x = x0 + i*(bw+gap);
const y = 10 + plotH - plotH*clamp(est[i]/maxY,0,1);
const h = plotH - (y-10);
ctxBar.fillStyle = "#51cf66";
ctxBar.fillRect(x, y, bw, h);
// SUCCESS / TOTAL on top
const succ = Math.max(0, postA[i] - 1); // successes tracked via Beta alpha
const total = pulls[i]; // total runs for this catalyst
ctxBar.fillStyle = "#e6e6e6";
ctxBar.font = "12px ui-sans-serif";
ctxBar.textAlign = "center";
ctxBar.fillText(`${succ}/${total}`, x + bw/2, y - 6);
// catalyst label
ctxBar.fillStyle = "#a3b3c2";
ctxBar.save();
ctxBar.translate(x + bw/2, H-15);
ctxBar.rotate(-0.1);
ctxBar.fillText(labels[i], 0, 0);
ctxBar.restore();
// true mean overlay if reveal
if(revealChk.checked){
const yTrue = 10 + plotH - plotH*clamp(trueP[i]/maxY,0,1);
ctxBar.strokeStyle = "#ffd84d";
ctxBar.beginPath(); ctxBar.moveTo(x, yTrue); ctxBar.lineTo(x+bw, yTrue); ctxBar.stroke();
}
}
labelline.textContent = `Rounds ${t} | Best true catalyst = ${labels[bestIdx]}`;
// capture clickable bar bounds
clickRegions = [];
for(let i=0;i<K;i++){
const x = x0 + i*(bw+gap);
clickRegions.push({i, x, w:bw, y:10, h:plotH});
}
}
function drawLines(){
const W = lineCanvas.width, H = lineCanvas.height;
ctxLine.clearRect(0,0,W,H);
// axes
ctxLine.strokeStyle = "#243042"; ctxLine.lineWidth = 1;
ctxLine.beginPath(); ctxLine.moveTo(40,10); ctxLine.lineTo(40,H-30); ctxLine.lineTo(W-10,H-30); ctxLine.stroke();
const plotW = W-60, plotH = H-50;
// grid
ctxLine.strokeStyle = "rgba(255,255,255,.06)";
for(let y=0;y<=10;y++){
const yy = 10 + plotH - plotH*(y/10);
ctxLine.beginPath(); ctxLine.moveTo(40, yy); ctxLine.lineTo(W-10, yy); ctxLine.stroke();
}
// avg reward
if(t>0){
const avg = []; let s=0;
for(let i=0;i<rewards.length;i++){ s+=rewards[i]; avg.push(s/(i+1)); }
ctxLine.strokeStyle = "#91d5ff"; ctxLine.lineWidth = 2;
ctxLine.beginPath();
for(let i=0;i<avg.length;i++){
const x = 40 + plotW * (i/(rewards.length-1 || 1));
const y = 10 + plotH - plotH*clamp(avg[i],0,1);
if(i===0) ctxLine.moveTo(x,y); else ctxLine.lineTo(x,y);
}
ctxLine.stroke();
// regret (rescale to fit nicely)
const reg = regret.slice();
const maxReg = Math.max(1, ...reg);
ctxLine.strokeStyle = "#ffa39e"; ctxLine.lineWidth = 2;
ctxLine.beginPath();
for(let i=0;i<reg.length;i++){
const x = 40 + plotW * (i/(reg.length-1 || 1));
const y = 10 + plotH - plotH*clamp(reg[i]/maxReg,0,1);
if(i===0) ctxLine.moveTo(x,y); else ctxLine.lineTo(x,y);
}
ctxLine.stroke();
}
}
// ---------- Interaction ----------
let clickRegions = []; // set by drawBars()
function canvasToLocal(canvas, evt){
const r = canvas.getBoundingClientRect();
const scaleX = canvas.width / r.width;
const scaleY = canvas.height / r.height;
return { x: (evt.clientX - r.left) * scaleX, y: (evt.clientY - r.top) * scaleY };
}
barCanvas.addEventListener("click", (e)=>{
if(getAlgo()!=="Manual") return;
const p = canvasToLocal(barCanvas, e);
for(const reg of clickRegions){
if(p.x>=reg.x && p.x<=reg.x+reg.w && p.y>=reg.y && p.y<=reg.y+reg.h){
stepOnce(reg.i);
drawBars(); drawLines();
return;
}
}
});
// keyboard 1..8
window.addEventListener("keydown", (e)=>{
if(getAlgo()!=="Manual") return;
if(e.key>="1" && e.key<="8"){
const i = parseInt(e.key,10)-1;
if(i>=0 && i<K){ stepOnce(i); drawBars(); drawLines(); }
}
});
// Buttons
runBtn.onclick = ()=>{
const algo = getAlgo();
if(algo==="Manual") return;
const steps = parseInt(stepsSlider.value,10);
for(let s=0;s<steps;s++){
let a = 0;
if(algo==="Eps") a = actEpsGreedy();
else if(algo==="UCB") a = actUCB1();
else if(algo==="TS") a = actThompson();
stepOnce(a);
}
drawBars(); drawLines();
};
stepBtn.onclick = ()=>{
const algo = getAlgo();
if(algo==="Manual") return;
let a = 0;
if(algo==="Eps") a = actEpsGreedy();
else if(algo==="UCB") a = actUCB1();
else if(algo==="TS") a = actThompson();
stepOnce(a);
drawBars(); drawLines();
};
resetBtn.onclick = ()=>{
t=0; est=Array(K).fill(0); pulls=Array(K).fill(0);
postA=Array(K).fill(1); postB=Array(K).fill(1);
rewards=[]; regret=[]; cumReward=0;
drawBars(); drawLines();
};
// Initial draw
drawBars(); drawLines();
})();
</script>
""")
ChemLab: explore vs exploit
You are screening catalysts for a reaction. Each catalyst has an unknown success rate (yield). You can run one experiment per round. Try a strategy: explore new catalysts to learn their true performance or exploit the best one you know so far. Compare strategies and watch how average yield and regret evolve.
Below are the equations we use for the above examples:
ε-greedy: explore random arm with prob ε, otherwise pick highest mean estimate.
est = s/n is average reward per arm; we update counts each step.
avg is cumulative average reward over time.
means = np.array([0.78, 0.72, 0.48, 0.44, 0.36, 0.30, 0.25, 0.18], dtype=float) #cat A to H
K = len(means)
def pull(arm, rng):
return float(rng.binomial(1, means[arm]))
# ε-greedy (simple math: est = s/n, pick max; cum avg = total/t)
def run_eps_greedy(T=600, eps=0.1, seed=2):
rng = np.random.default_rng(seed)
n = np.zeros(K, int); s = np.zeros(K, float)
avg = []; total = 0.0
for t in range(1, T+1):
if rng.random() < eps:
a = int(rng.integers(0, K))
else:
est = s / np.maximum(1, n)
ties = np.flatnonzero(est == est.max())
a = int(rng.choice(ties))
r = pull(a, rng); n[a] += 1; s[a] += r; total += r
avg.append(total / t)
return np.array(avg), n, s
avg_e, n_e, s_e = run_eps_greedy()
plt.plot(avg_e); plt.xlabel("step"); plt.ylabel("average reward"); plt.title("Epsilon greedy"); plt.show()
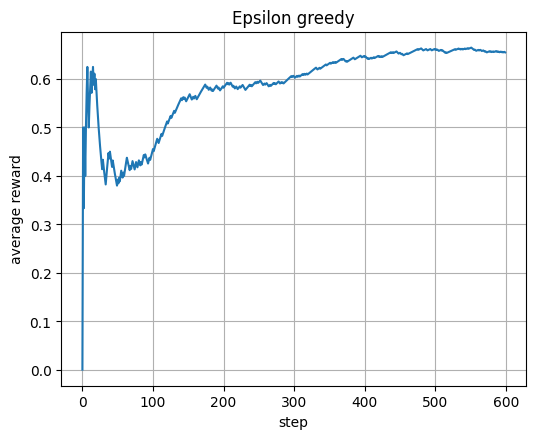
UCB1: each arm starts once; after that use est + sqrt(2 ln t / n).
This bonus term encourages early exploration and later exploitation.
avg shows how the average reward improves over time.
# UCB1 (simple math: est = s/n, bonus = sqrt(2 ln t / n); cum avg)
def run_ucb1(T=600, seed=3):
rng = np.random.default_rng(seed)
n = np.zeros(K, int); s = np.zeros(K, float)
avg = []; total = 0.0
# pull each arm once
for a in range(K):
r = pull(a, rng); n[a] += 1; s[a] += r; total += r
avg.append(total / (a+1))
# then UCB
for t in range(K+1, T+1):
est = s / n
bonus = np.sqrt(2.0 * np.log(t) / n)
a = int(np.argmax(est + bonus))
r = pull(a, rng); n[a] += 1; s[a] += r; total += r
avg.append(total / t)
return np.array(avg), n, s
avg_u, n_u, s_u = run_ucb1()
plt.plot(avg_u); plt.xlabel("step"); plt.ylabel("average reward"); plt.title("UCB1"); plt.show()
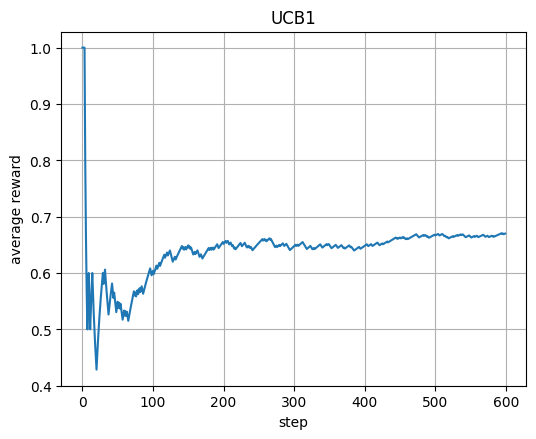
Thompson sampling: each arm has Beta(a,b) belief; sample, pick highest.
Update a+=r (success) and b+=(1−r) (failure) each step.
avg shows how Bayesian exploration converges to best catalyst.
# Thompson (simple math: Beta(a,b); sample; update a+=r, b+=(1-r); cum avg)
def run_thompson(T=600, seed=4):
rng = np.random.default_rng(seed)
a_cnt = np.ones(K); b_cnt = np.ones(K)
avg = []; total = 0.0
for t in range(1, T+1):
samples = rng.beta(a_cnt, b_cnt)
a = int(np.argmax(samples))
r = pull(a, rng); total += r
a_cnt[a] += r; b_cnt[a] += (1.0 - r)
avg.append(total / t)
return np.array(avg), a_cnt, b_cnt
avg_t, a_t, b_t = run_thompson()
plt.plot(avg_t); plt.xlabel("step"); plt.ylabel("average reward"); plt.title("Thompson sampling"); plt.show()
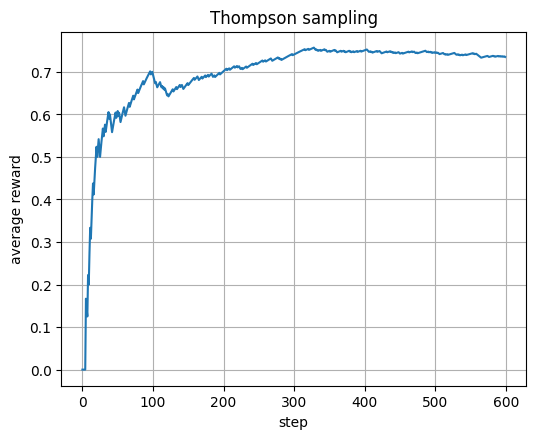
Beta(a,b) belief:
Each curve below shows how the distribution changes as successes (a) and failures (b) grow.
High a → belief shifts toward 1.
High b → belief shifts toward 0.
Beta(1,1) is uniform (complete uncertainty).
Beta(1,1) → flat line (no knowledge yet).
Beta(5,2) → skewed right (we’ve seen mostly successes).
Beta(2,5) → skewed left (mostly failures).
As counts rise (e.g., Beta(20,5)), the curve narrows — higher confidence in the estimate.
Show code cell source
"""
Beta(a,b) belief plot:
Each curve shows how the distribution changes as successes (a) and failures (b) grow.
High a → belief shifts toward 1. High b → belief shifts toward 0.
Beta(1,1) is uniform (complete uncertainty).
"""
import numpy as np, matplotlib.pyplot as plt
from scipy.stats import beta
x = np.linspace(0, 1, 200)
params = [(1,1), (2,5), (5,2), (10,10), (20,5)]
plt.figure(figsize=(6,4))
for a,b in params:
plt.plot(x, beta.pdf(x, a, b), label=f"a={a}, b={b}")
plt.title("Beta(a,b) belief distributions")
plt.xlabel("success probability (p)")
plt.ylabel("density")
plt.legend()
plt.show()
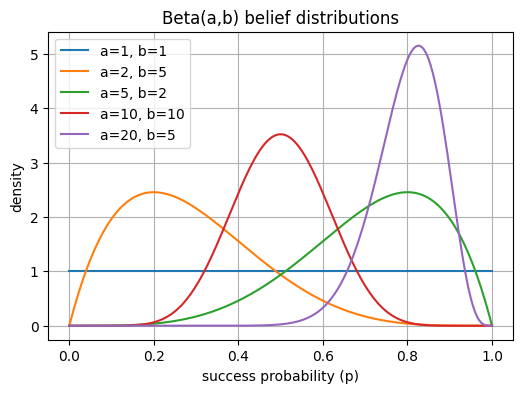
5. Case study: MOF synthesis as a bandit on yield#
We will use the synthetic MOF dataset we seen in the last lecture. It records outcomes for combinations of temperature, time, concentration, solvent identity, and the organic linker.
For this version we focus on yield only in the range [0, 1]. The goal is to find general synthesis conditions that give high yield for each of 10 linkers.
The dataset acts as our simulator. Each time the bandit chooses a recipe the simulator samples a matching row and returns its yield.
Note
For this section, please use Google Colab to run. Below only code is shown.
5.1 Load and process the dataset#
# Load full dataset
url = "https://raw.githubusercontent.com/zzhenglab/ai4chem/main/book/_data/mof_yield_dataset.csv"
df_raw = pd.read_csv(url)
# Pick the 10 most frequent linkers so each has adequate coverage in the table
top_linkers = df_raw['smiles'].value_counts().head(10).index.tolist()
def linker_actions(df_like, linker):
"""All condition tuples that actually exist for this linker."""
sub = df_like[df_like['smiles'] == linker]
acts = (
sub[['temperature','time_h','concentration_M','solvent_DMF']]
.drop_duplicates()
.itertuples(index=False, name=None)
)
return list(acts)
def make_pull_yield(df_like, linker, acts):
"""
Return a function pull(action, rng) -> yield in [0,1], sampling from rows observed for this linker+action.
If an action is not present for the linker it is skipped upstream, so we do not synthesize data.
"""
pools = {}
sub_all = df_like[df_like['smiles'] == linker]
for a in acts:
T,H,C,S = a
pool = sub_all[
(sub_all['temperature'] == T) &
(sub_all['time_h'] == H) &
(sub_all['concentration_M'] == C) &
(sub_all['solvent_DMF'] == S)
]
if not pool.empty:
pools[a] = pool.reset_index(drop=True)
def pull_fn(a, rng):
pool = pools.get(a)
if pool is None or len(pool) == 0:
return None
row = pool.iloc[int(rng.integers(0, len(pool)))]
return float(row['yield'])
return pull_fn
def fmt_action(a):
T,H,C,S = a
return f"T={T}°C, t={H}h, c={C:.2f} M, solvent={'DMF' if S==1 else 'H2O'}"
top_linkers
---------------------------------------------------------------------------
HTTPError Traceback (most recent call last)
Cell In[12], line 3
1 # Load full dataset
2 url = "https://raw.githubusercontent.com/zzhenglab/ai4chem/main/book/_data/mof_yield_dataset.csv"
----> 3 df_raw = pd.read_csv(url)
5 # Pick the 10 most frequent linkers so each has adequate coverage in the table
6 top_linkers = df_raw['smiles'].value_counts().head(10).index.tolist()
File c:\users\52377\appdata\local\programs\python\python38\lib\site-packages\pandas\io\parsers\readers.py:912, in read_csv(filepath_or_buffer, sep, delimiter, header, names, index_col, usecols, dtype, engine, converters, true_values, false_values, skipinitialspace, skiprows, skipfooter, nrows, na_values, keep_default_na, na_filter, verbose, skip_blank_lines, parse_dates, infer_datetime_format, keep_date_col, date_parser, date_format, dayfirst, cache_dates, iterator, chunksize, compression, thousands, decimal, lineterminator, quotechar, quoting, doublequote, escapechar, comment, encoding, encoding_errors, dialect, on_bad_lines, delim_whitespace, low_memory, memory_map, float_precision, storage_options, dtype_backend)
899 kwds_defaults = _refine_defaults_read(
900 dialect,
901 delimiter,
(...)
908 dtype_backend=dtype_backend,
909 )
910 kwds.update(kwds_defaults)
--> 912 return _read(filepath_or_buffer, kwds)
File c:\users\52377\appdata\local\programs\python\python38\lib\site-packages\pandas\io\parsers\readers.py:577, in _read(filepath_or_buffer, kwds)
574 _validate_names(kwds.get("names", None))
576 # Create the parser.
--> 577 parser = TextFileReader(filepath_or_buffer, **kwds)
579 if chunksize or iterator:
580 return parser
File c:\users\52377\appdata\local\programs\python\python38\lib\site-packages\pandas\io\parsers\readers.py:1407, in TextFileReader.__init__(self, f, engine, **kwds)
1404 self.options["has_index_names"] = kwds["has_index_names"]
1406 self.handles: IOHandles | None = None
-> 1407 self._engine = self._make_engine(f, self.engine)
File c:\users\52377\appdata\local\programs\python\python38\lib\site-packages\pandas\io\parsers\readers.py:1661, in TextFileReader._make_engine(self, f, engine)
1659 if "b" not in mode:
1660 mode += "b"
-> 1661 self.handles = get_handle(
1662 f,
1663 mode,
1664 encoding=self.options.get("encoding", None),
1665 compression=self.options.get("compression", None),
1666 memory_map=self.options.get("memory_map", False),
1667 is_text=is_text,
1668 errors=self.options.get("encoding_errors", "strict"),
1669 storage_options=self.options.get("storage_options", None),
1670 )
1671 assert self.handles is not None
1672 f = self.handles.handle
File c:\users\52377\appdata\local\programs\python\python38\lib\site-packages\pandas\io\common.py:716, in get_handle(path_or_buf, mode, encoding, compression, memory_map, is_text, errors, storage_options)
713 codecs.lookup_error(errors)
715 # open URLs
--> 716 ioargs = _get_filepath_or_buffer(
717 path_or_buf,
718 encoding=encoding,
719 compression=compression,
720 mode=mode,
721 storage_options=storage_options,
722 )
724 handle = ioargs.filepath_or_buffer
725 handles: list[BaseBuffer]
File c:\users\52377\appdata\local\programs\python\python38\lib\site-packages\pandas\io\common.py:368, in _get_filepath_or_buffer(filepath_or_buffer, encoding, compression, mode, storage_options)
366 # assuming storage_options is to be interpreted as headers
367 req_info = urllib.request.Request(filepath_or_buffer, headers=storage_options)
--> 368 with urlopen(req_info) as req:
369 content_encoding = req.headers.get("Content-Encoding", None)
370 if content_encoding == "gzip":
371 # Override compression based on Content-Encoding header
File c:\users\52377\appdata\local\programs\python\python38\lib\site-packages\pandas\io\common.py:270, in urlopen(*args, **kwargs)
264 """
265 Lazy-import wrapper for stdlib urlopen, as that imports a big chunk of
266 the stdlib.
267 """
268 import urllib.request
--> 270 return urllib.request.urlopen(*args, **kwargs)
File c:\users\52377\appdata\local\programs\python\python38\lib\urllib\request.py:222, in urlopen(url, data, timeout, cafile, capath, cadefault, context)
220 else:
221 opener = _opener
--> 222 return opener.open(url, data, timeout)
File c:\users\52377\appdata\local\programs\python\python38\lib\urllib\request.py:531, in OpenerDirector.open(self, fullurl, data, timeout)
529 for processor in self.process_response.get(protocol, []):
530 meth = getattr(processor, meth_name)
--> 531 response = meth(req, response)
533 return response
File c:\users\52377\appdata\local\programs\python\python38\lib\urllib\request.py:640, in HTTPErrorProcessor.http_response(self, request, response)
637 # According to RFC 2616, "2xx" code indicates that the client's
638 # request was successfully received, understood, and accepted.
639 if not (200 <= code < 300):
--> 640 response = self.parent.error(
641 'http', request, response, code, msg, hdrs)
643 return response
File c:\users\52377\appdata\local\programs\python\python38\lib\urllib\request.py:569, in OpenerDirector.error(self, proto, *args)
567 if http_err:
568 args = (dict, 'default', 'http_error_default') + orig_args
--> 569 return self._call_chain(*args)
File c:\users\52377\appdata\local\programs\python\python38\lib\urllib\request.py:502, in OpenerDirector._call_chain(self, chain, kind, meth_name, *args)
500 for handler in handlers:
501 func = getattr(handler, meth_name)
--> 502 result = func(*args)
503 if result is not None:
504 return result
File c:\users\52377\appdata\local\programs\python\python38\lib\urllib\request.py:649, in HTTPDefaultErrorHandler.http_error_default(self, req, fp, code, msg, hdrs)
648 def http_error_default(self, req, fp, code, msg, hdrs):
--> 649 raise HTTPError(req.full_url, code, msg, hdrs, fp)
HTTPError: HTTP Error 404: Not Found
5.2 Bandit framing and algorithms#
We treat each unique recipe as an arm and the yield as the reward. Rewards are bounded in [0, 1], which suits UCB1 on sample means.
For Thompson sampling we use a Beta posterior heuristic that accumulates alpha plus equal to yield and beta plus equal to 1 minus yield. This gives a simple way to sample optimistic beliefs for continuous bounded outcomes without converting to binary success. We also include ε greedy on the mean yield for a familiar baseline.
All algorithms run per linker so each linker gets a focused search over the actions that actually appear in the data.
# Section 2: Bandit agents for bounded rewards in [0,1]
def run_eps_mean_linker(df_like, linker, Tsteps=400, eps=0.1, seed=0):
acts = linker_actions(df_like, linker)
if len(acts) == 0:
return dict(avg=np.array([]), n=np.array([]), s=np.array([]), best=None, acts=[])
rng = np.random.default_rng(seed)
K = len(acts)
n = np.zeros(K, int) # pulls
s = np.zeros(K, float) # sum of yields
avg = []; total = 0.0
pull = make_pull_yield(df_like, linker, acts)
for t in range(1, Tsteps+1):
if rng.random() < eps:
a = int(rng.integers(0, K))
else:
est = s / np.maximum(1, n)
m = est.max(); ties = np.flatnonzero(np.isclose(est, m))
a = int(rng.choice(ties))
r = pull(acts[a], rng)
if r is None:
continue
n[a]+=1; s[a]+=r; total+=r
avg.append(total/t)
if n.sum()==0:
return dict(avg=np.array([]), n=n, s=s, best=None, acts=acts)
best = int(np.argmax(s/np.maximum(1,n)))
return dict(avg=np.asarray(avg), n=n, s=s, best=best, acts=acts)
def run_ucb1_mean_linker(df_like, linker, Tsteps=400, seed=0):
acts = linker_actions(df_like, linker)
if len(acts) == 0:
return dict(avg=np.array([]), n=np.array([]), s=np.array([]), best=None, acts=[])
rng = np.random.default_rng(seed)
K = len(acts)
n = np.zeros(K, int); s = np.zeros(K, float)
avg = []; total = 0.0
pull = make_pull_yield(df_like, linker, acts)
# small warm start to avoid zero-division
tried = 0
for a in range(min(K, 10)):
r = pull(acts[a], rng)
if r is None:
continue
n[a]+=1; s[a]+=r; total+=r; tried += 1
avg.append(total/tried)
for t in range(tried+1, Tsteps+1):
est = s/np.maximum(1,n)
bonus = np.sqrt(2.0*np.log(max(2, t))/np.maximum(1,n))
a = int(np.argmax(est + bonus))
r = pull(acts[a], rng)
if r is None:
continue
n[a]+=1; s[a]+=r; total+=r
avg.append(total/(len(avg)+1))
if n.sum()==0:
return dict(avg=np.array([]), n=n, s=s, best=None, acts=acts)
best = int(np.argmax(s/np.maximum(1,n)))
return dict(avg=np.asarray(avg), n=n, s=s, best=best, acts=acts)
def run_thompson_beta_linker(df_like, linker, Tsteps=400, seed=0):
"""
Thompson with a Beta posterior heuristic for bounded yields.
alpha += yield, beta += 1 - yield.
"""
acts = linker_actions(df_like, linker)
if len(acts) == 0:
return dict(avg=np.array([]), n=np.array([]), s=np.array([]), best=None, acts=[])
rng = np.random.default_rng(seed)
K = len(acts)
alpha = np.ones(K); beta = np.ones(K)
n = np.zeros(K, int); s = np.zeros(K, float)
avg = []; total = 0.0
pull = make_pull_yield(df_like, linker, acts)
for t in range(1, Tsteps+1):
samples = rng.beta(alpha, beta)
a = int(np.argmax(samples))
r = pull(acts[a], rng)
if r is None:
continue
n[a]+=1; s[a]+=r; total+=r
alpha[a] += r
beta[a] += (1.0 - r)
avg.append(total/t)
if n.sum()==0:
return dict(avg=np.array([]), n=n, s=s, best=None, acts=acts)
best = int(np.argmax(s/np.maximum(1,n)))
return dict(avg=np.asarray(avg), n=n, s=s, best=best, acts=acts)
def summarize_agent(linker, name, out):
best = out["best"]; acts = out["acts"]
if best is None or len(acts) == 0:
return dict(linker=linker, agent=name, recipe="NA", pulls=0, mean_yield=np.nan)
n, s = out["n"], out["s"]
return dict(
linker=linker, agent=name,
recipe=fmt_action(acts[best]),
pulls=int(n[best]),
mean_yield=float(s[best]/max(1,n[best]))
)
5.3 Running the agents and building a compact report#
We now run ε greedy, UCB1, and Thompson Beta for each of the 10 linkers. Each agent interacts with a simulator that returns yields for recipes that are actually in the table for that linker.
We then summarize the best recipe per agent by its mean yield and also produce one recommended recipe per linker by taking the top mean yield across agents. This gives a short list of general conditions to try first in the lab for each linker.
# Section 3: Execute agents and summarize best recipes per linker
results = []
curves = []
for linker in top_linkers:
eps = run_eps_mean_linker (df_raw, linker, Tsteps=50, eps=0.1, seed=42)
ucb = run_ucb1_mean_linker (df_raw, linker, Tsteps=50, seed=42)
ts = run_thompson_beta_linker(df_raw, linker, Tsteps=50, seed=42)
results.extend([
summarize_agent(linker, "eps_greedy", eps),
summarize_agent(linker, "ucb1", ucb),
summarize_agent(linker, "thompson_beta", ts),
])
curves.append((linker, eps.get("avg", np.array([])), ucb.get("avg", np.array([])), ts.get("avg", np.array([]))))
summary_df = pd.DataFrame(results).sort_values(["linker","mean_yield"], ascending=[True, False]).reset_index(drop=True)
print("Per-linker best by agent (first 12 rows):")
summary_df.head(12)
best_by_linker = (
summary_df
.groupby("linker", as_index=False)
.first()[["linker","agent","recipe","pulls","mean_yield"]]
)
print("\nOne recommended recipe per linker by highest mean yield across agents:")
best_by_linker
5.4 Interpreting the results and tracking learning#
The table lists a best recipe per agent for each linker together with the number of pulls used to estimate its mean yield. If a best recipe shows very few pulls you can increase the step budget or run another pass to confirm stability. Learning curves help you see whether the agent is still exploring or has stabilized on a high yielding recipe. Consistent upward trends suggest the action set has a clear winner for that linker. Flat or noisy curves suggest multiple near ties or limited coverage in the dataset for that linker.
Show code cell source
# Section 4: Plot learning curves for a few linkers
show_n = min(10, len(curves))
fig, axes = plt.subplots(show_n, 1, figsize=(6, 3*show_n), sharex=True)
if show_n == 1:
axes = [axes]
for ax, (linker, avg_e, avg_u, avg_t) in zip(axes, curves[:show_n]):
if avg_e.size: ax.plot(avg_e, label="ε greedy")
if avg_u.size: ax.plot(avg_u, label="UCB1")
if avg_t.size: ax.plot(avg_t, label="Thompson Beta")
ax.set_title(f"Average yield over steps | {linker}")
ax.set_ylabel("avg yield")
ax.legend()
axes[-1].set_xlabel("step")
plt.tight_layout()
plt.show()
Show code cell source
# Define the columns
cols = ["linker", "agent", "recipe", "pulls", "mean_yield"]
# Top 3 recipes per linker so you can see near ties
top3 = (
summary_df.sort_values(["linker","mean_yield"], ascending=[True, False])
.groupby("linker")
.head(3)[cols]
.reset_index(drop=True)
)
print("Top 3 per linker")
top3
5.5 General synthesis condition works best across all linkers#
Finally, instead of looking at per-linker optima, we can also look at if there is a a single “general” synthesis condition across the 10 linkers.
Show code cell source
# Find one general synthesis condition that works best across linkers
# using the true yields in the dataset as ground truth
# Choose top 10 linkers by frequency
top_linkers = df_raw['smiles'].value_counts().head(10).index.tolist()
print(f"Selected {len(top_linkers)} linkers")
# ----------------------------------------------------
# Step 1: Identify condition combinations (T, time, conc, solvent)
# that appear in most linkers
# ----------------------------------------------------
def actions_for_linker(df_like, linker):
return set(
tuple(row)
for row in df_like.loc[df_like['smiles']==linker,
['temperature','time_h','concentration_M','solvent_DMF']
].drop_duplicates().to_numpy()
)
from collections import Counter
cnt = Counter()
acts_per_linker = [actions_for_linker(df_raw, lk) for lk in top_linkers]
for acts in acts_per_linker: cnt.update(acts)
# keep actions that exist in at least 8 of 10 linkers
common_actions = {a for a,c in cnt.items() if c >= 8}
print(f"Candidate shared recipes: {len(common_actions)}")
# ----------------------------------------------------
# Step 2: compute true mean yield for each linker at each condition
# and average across linkers
# ----------------------------------------------------
def fmt_action(a):
T,H,C,S = a
return f"T={int(T)}°C, t={int(H)}h, c={C:.2f} M, solvent={'DMF' if int(S)==1 else 'H2O'}"
rows = []
for a in common_actions:
T,H,C,S = a
per_linker_means = []
for lk in top_linkers:
sub = df_raw[
(df_raw['smiles']==lk)&
(df_raw['temperature']==T)&
(df_raw['time_h']==H)&
(df_raw['concentration_M']==C)&
(df_raw['solvent_DMF']==S)
]
if len(sub)>0:
per_linker_means.append(sub['yield'].mean())
if per_linker_means:
rows.append({
"recipe": fmt_action(a),
"coverage": len(per_linker_means),
"mean_yield_all": np.mean(per_linker_means),
"median_yield": np.median(per_linker_means),
"min_yield": np.min(per_linker_means),
"max_yield": np.max(per_linker_means),
})
summary = pd.DataFrame(rows).sort_values(
["coverage","mean_yield_all","median_yield"], ascending=[False,False,False]
).reset_index(drop=True)
# ----------------------------------------------------
# Step 3: show the best general condition with ground truth stats
# ----------------------------------------------------
if summary.empty:
print("No overlapping recipe found for most linkers.")
else:
best = summary.iloc[0]
print("\n=== General synthesis condition (best average yield across linkers) ===")
print(best.to_string())
print("\n--- Top 5 general recipes for reference ---")
summary.head(5)
Note
This computes the “general condition” that gives the highest average yield across multiple linkers. It first finds recipes appearing for most linkers, computes their true mean yield per linker from the dataset, then averages those means. The result lists a single synthesis condition that is empirically best overall, along with its average, median, and range of yields across linkers.
Results: === General synthesis condition (best average yield across linkers) === recipe T=130°C, t=60h, c=0.25 M, solvent=DMF coverage 10 mean_yield_all 0.73 median_yield 0.855 min_yield 0.23 max_yield 0.99
6. Glossary#
- Agent #
The decision maker that picks the next experiment.
- Environment #
The lab or simulator returning outcomes.
- Policy #
Mapping from states to actions.
- Q value #
Expected return from a state-action pair.
- Return #
Discounted sum of future rewards.
- Epsilon greedy #
Random with probability epsilon, else greedy.
- UCB1 #
Bonus for uncertainty to balance exploration.
- Thompson sampling #
Posterior sampling strategy.
- On policy #
Learn about the policy you execute.
7. In-class activity#
Q1#
Now it’s time to review the detailed code for the three demo games. Identify where the reward score is defined, and modify it in the code to observe how the behavior changes.
You can also adjust the design of the games. For example, change 0 and 1 in demo 3 to see how this influences the agent in finding the optimal strategy.